高専トピックス

アイデア対決・全国高等専門学校ロボットコンテスト(以下、高専ロボコン)は、1988年に始まって以来、毎年開催されており、今年で38回を迎えます。
高専ロボコンは全国の高専生が、毎年異なる競技課題に、アイデアを駆使してロボットを製作し、競技を通じてその成果を競うコンテストです。
本大会では、地区大会(北海道、東北、関東甲信越、東海北陸、近畿、中国、四国、九州沖縄)を勝ち抜いた25チームが出場しました。

会場となった墨田区両国国技館入口前。
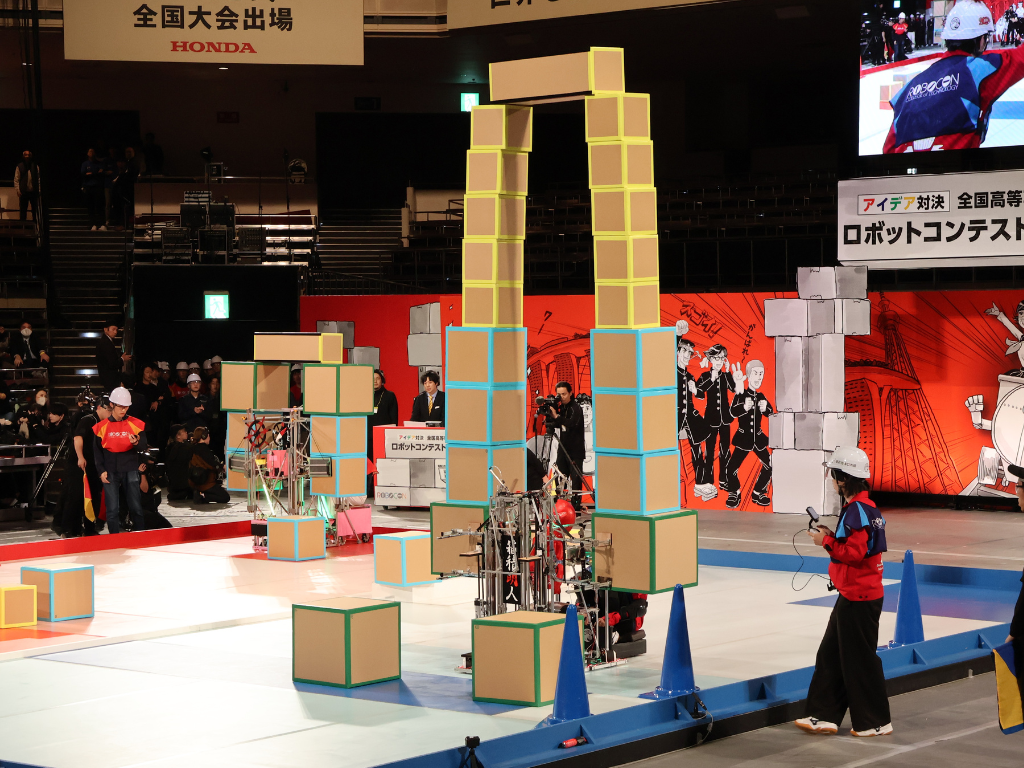
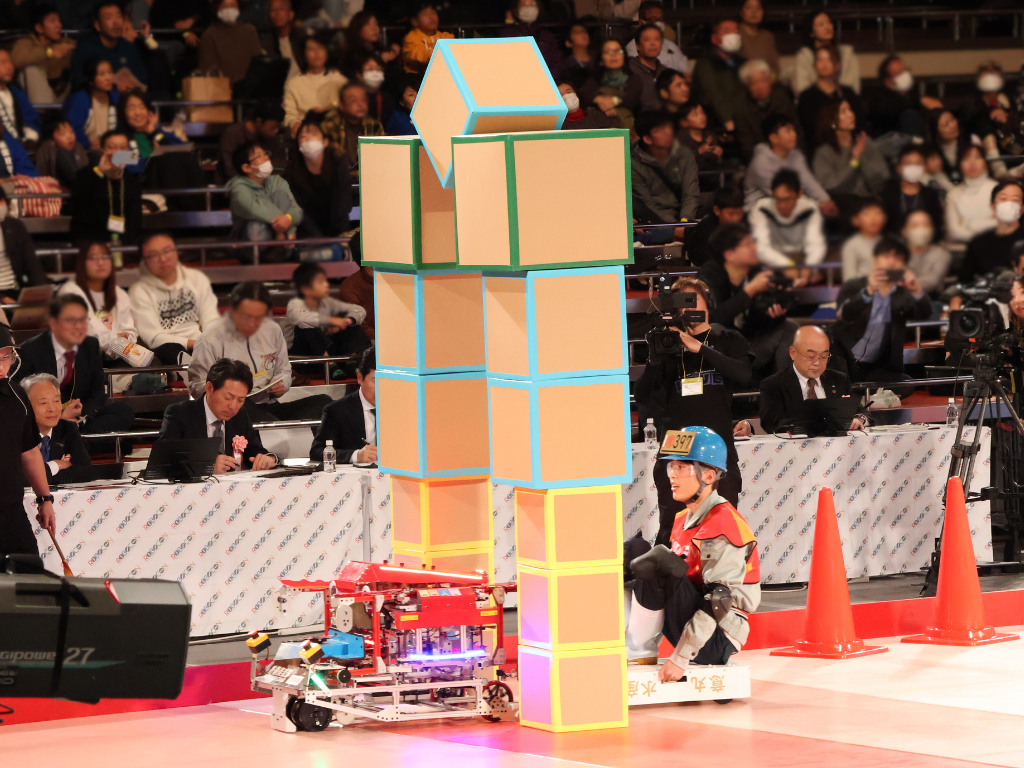
今年の競技テーマは「Great High Gate」です。まず、ロボットがボックスを運んで積み上げ、ゲートを構築します。ゲートが完成すると、ロボットは人を乗せた台車と連結し、その台車とともにゲートを通過します。ゲートの高さに応じた基本点と、通過するたびに加算される得点の合計点を競います。
ボックスを高く積み上げる技術と、台車に乗った人を安全に運ぶための機構や制御を両立させることが、大きなポイントとなります。高専生たちがこの難題にどのようなアイデアと技術力で挑むのかが、今大会の最大の見どころです。
本記事では、2025年11月16日(日)に開催された高専ロボコン全国大会の熱戦の様子や会場の雰囲気を、受賞チームのロボットとともにお届けします。
(掲載開始日:2025年12月3日)
テーマ・ルール
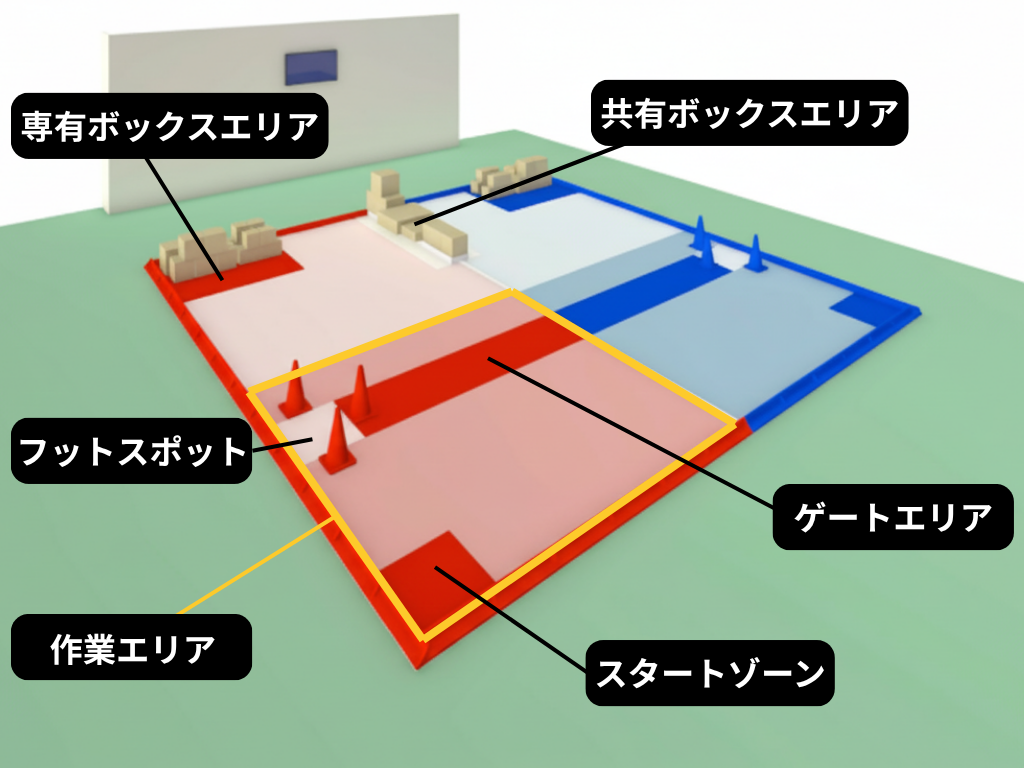
競技フィールド概要図。競技フィールドは、赤ゾーン・青ゾーン・共有ボックスエリアにわかれており、各エリアの名称は図に示す通り(図では、赤チームのエリアの説明であるが、青チームも同様である)。
本大会のミッションは、ロボットがボックスを積み上げて巨大なゲートを構築し、人が乗った台車と連結して、そのゲートを通過するというものです。建築現場での資材運搬や大型構造物の組み立て、さらには人と機械の協調作業などを想起させるテーマとなっています。
競技フィールドは、主に「作業エリア」、「専有ボックスエリア」、「共有ボックスエリア」の3つのエリアに分かれています。「作業エリア」は、ロボットが運んできたボックスでゲートを構築するエリアであり、その中に「スタートゾーン」やゲートを構築する「ゲートエリア」も含みます。「専有ボックスエリア」には各チーム専用のボックスとチームメンバー(搭乗者)が乗る台車が置かれ、「共有ボックスエリア」には両チームが共有で使えるボックスが配置されています。
ロボットは、ボックスの運搬、積み上げ、ゲート通過のすべてを行います。スタート後、まず作業エリア内のパイロン(縦 380mm×横 380mm×高さ 700mm)をエリア外に移動させ(1個5点)、次に、専有・共有の両エリアからボックスを作業エリアへ運びます。そして、ゲートエリア内の指定された「フットスポット」にゲートの片脚が接地するようにして、「門状」のゲートを構築します。ゲートが完成したら、ロボットはチームメンバー(搭乗者)が乗った台車と連結し、構築したゲート間を通過することで、ゲートの高さに応じた得点(100mmごとに10点)が入ります。
2回目以降の通過でも追加得点(5点)が得られるほか、競技終了時に相手より高いゲートを構築していれば「高さ得点」として50点が加算されます。競技時間は3分間、ロボットのレギュレーションは重量30kg以内、サイズ縦1000mm×横1000mm×高さ1200mm(競技中は高さ2500mmまで展開可能)です。
また、競技スタート前には、セッティングタイムが1分間設けられており、この時間を利用して、各チームはロボットの最終調整を行うとともに、占有ボックスの配置を自由に変更出来ます。
このボックスの配置変更は、勝利のための重要な布石となります。競技開始後のゲート構築を円滑に進めるために、ロボットが取りやすい位置にボックスを配置したり、ゲートのパーツとなる柱やゲート本体そのものを構築しておく等、各チームの独自の作戦に基づいて実施されます。
今回のルールは、迅速なパイロン処理、効率的なボックス運搬、高く安定したゲート構築技術、搭乗者の安全な移送など、考慮すべきポイントが多く、高専生のアイデアの見せ所となっています。中でも特に注目すべきは、人が乗った台車と連結してゲートを通過する「人と機械の協調」です。高専ロボコンの歴史において、人がマシンに乗るルールは1988年(第1回)の「乾電池カー・スピードレース」や、2010年(第23回)の「激走! ロボ力車」(人が運ばれるミッション)がありました。今回は、まさにその「ロボ力車」以来、久しぶりに人がフィールドでロボットと共にミッションに挑むルールが採用されました。
対戦形式はトーナメント形式ですが、1・2回戦で惜敗したチームの中から特に戦いぶりが優れていたチームの敗者復活枠「ワイルドカード」を審査員が選出し、選ばれたチームには準々決勝への進出権が与えられます。
なお、トーナメントを勝ち上がった優勝チームと準優勝チームには表彰が贈られます。
また、大きな夢とロマンを持ってロボットを製作し、見る者に深い感動を与え、唯一無二のアイデアを実現したチームには、最も名誉ある賞「ロボコン大賞」が贈られます。
この他にも、アイデア賞、技術賞、デザイン賞、アイデア倒れ賞、特別賞など、多様な賞が設けられています。これにより、点数化されない部分も含め、参加チームのひたむきな努力と斬新な発想が幅広く評価されます。
表彰されたチーム一覧(学校名・プロジェクト名・賞)
| 学校名 | プロジェクト名 | 賞 |
| 熊本高等専門学校(熊本キャンパス) | 強奪名星 | ロボコン大賞・準優勝 |
| 旭川工業高等専門学校 | 天旋 | 優勝 |
| 明石工業高等専門学校 | 箱積明人 | アイデア賞 |
| 奈良工業高等専門学校 | 金剛 | 技術賞 |
| 国際高等専門学校 | 香箱倶楽部 | デザイン賞 |
| 鈴鹿工業高等専門学校 | 鈴観音 | アイデア倒れ賞 |
| 富山高等専門学校(本郷キャンパス) | カニメイト | 特別賞(本田技研工業株式会社) |
| 米子工業高等専門学校 | 蜈蚣 | 特別賞(マブチモーター株式会社) |
| 鹿児島工業高等専門学校 | 凱旋 | 特別賞(株式会社安川電機) |
| 熊本高等専門学校(八代キャンパス) | 建築は旋門凱 | 特別賞(東京エレクトロン株式会社) |
| 一関工業高等専門学校 | 猩猩 | 特別賞(株式会社田中貴金属グループ) |
| 東京工業高等専門学校 | 明修羅 | 特別賞(ローム株式会社) |
| 神戸市立工業高等専門学校 | 凱船門 | 特別賞(セメダイン株式会社) |
| 小山工業高等専門学校 | オヤマシュランラン | 特別賞(株式会社デンソー) |
ロボコン大賞・準優勝:国立 熊本高等専門学校(熊本キャンパス) [熊本県]

左右のアームを器用に操作し、大きさの違うボックスを自在に掴むことが可能。これにより、ゲートの高さを試合展開に応じて臨機応変に変える戦略的柔軟性を実現している。
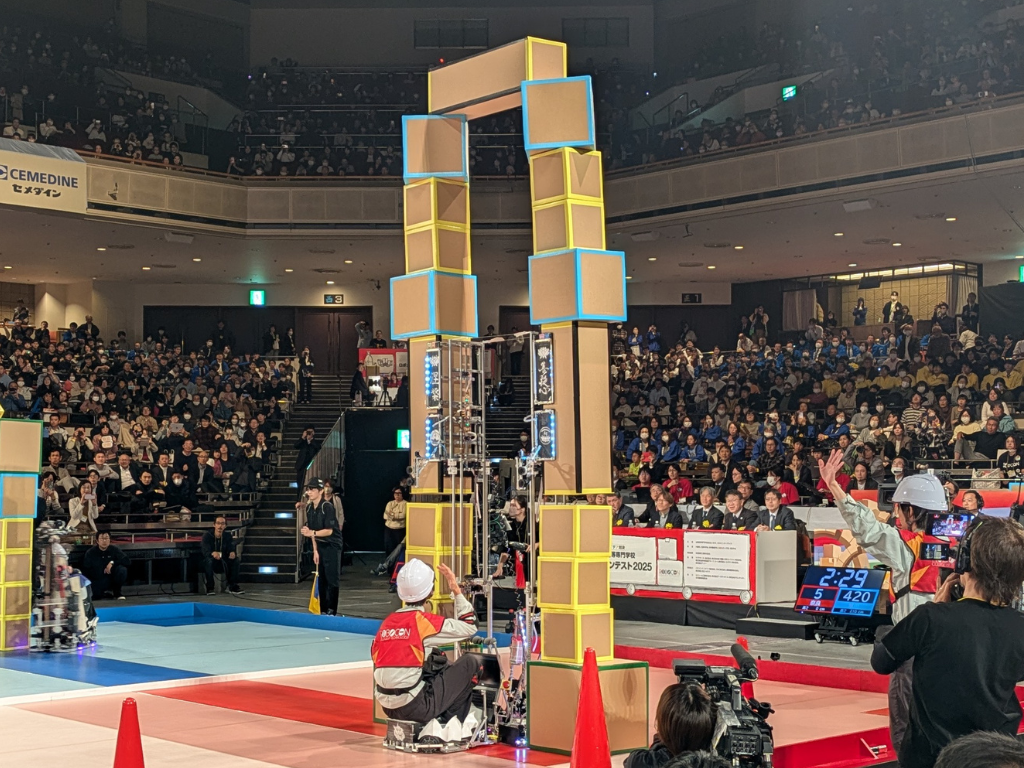
決勝の舞台で見事つくりあげた4m20cmの巨大ゲート。今大会最大の高さは、観客の度肝を抜き、会場全体が割れんばかりの歓声と熱気に包まれた。
プロジェクト名:強奪名星(ロブスター)
栄誉あるロボコン大賞に輝いたのは、熊本高専(熊本キャンパス)です。製作した「強奪名星(ロブスター)」は、シンプルな構造と高度な技術力を磨き上げ、高いゲートを建てるロボットとして注目を集めました。
本機最大のアピールポイントは、左右に備えた汎用性の高い可変式アームです。全てのボックスを自在に掴み、状況に応じて様々な高さのゲートを構築できるのが特徴です。俊敏な走行で共有ボックスエリアのボックスを素早く回収すると、ボックスを順に積み上げ、最後には2.5m付近まで一気にアームを展開してゲートを完成させます。この高度な性能は、徹底したつくり込みによって支えられています。本機は3号機としてブラッシュアップが重ねられ、部内戦だけでも100回以上の試技をこなし、微修正と最適化を繰り返しました。その結果、ハードウェアは地区大会の時点で、メンテナンスフリーと言えるほど極めて高い完成度を誇っていました。
万全の体制で臨んだ本大会でしたが、立ち上がりは厳しいものとなりました。初戦の旭川高専との対戦では、勝利のために4m20cmの巨大ゲートの構築に挑みましたが、ゲートの完成は叶わず、無念の敗退を喫しました。しかし、審査員から、確かな技術力とポテンシャルが高く評価されワイルドカード枠で復活を果たしました。準々決勝、準決勝と勝ち進むにつれ、ロボットはその実力をいかんなく発揮し、安定して3m20cmのゲートを構築しました。遂には決勝の舞台で、初戦で敗れた旭川高専との雪辱を期す再戦に臨むことになりました。
そして、決勝戦では、初戦で達成出来なかった、今大会でどのチームも完成させていない4m20cmの巨大ゲートの完成を目指す大勝負に挑みました。観客が固唾をのんで見守る中、見事に巨大ゲートを完成させて、今大会の高得点となる475点を獲得しました。ゲートが立ち上がった瞬間、会場は割れんばかりの歓声と拍手に包まれ、熊本高専の挑戦は多くの観客の胸を打ちました。しかし、旭川高専の得点にはわずかに及ばず、試合には惜しくも敗れる結果となりました。
試合には惜敗しましたが、高さの限界に挑み続けた熊本高専は、今回のテーマに真正面から向き合い、4m20cmを積み上げた技術力とチャレンジ精神が称えられ、見事、最も名誉ある賞であるロボコン大賞を受賞しました。
優勝:国立 旭川工業高等専門学校 [北海道]
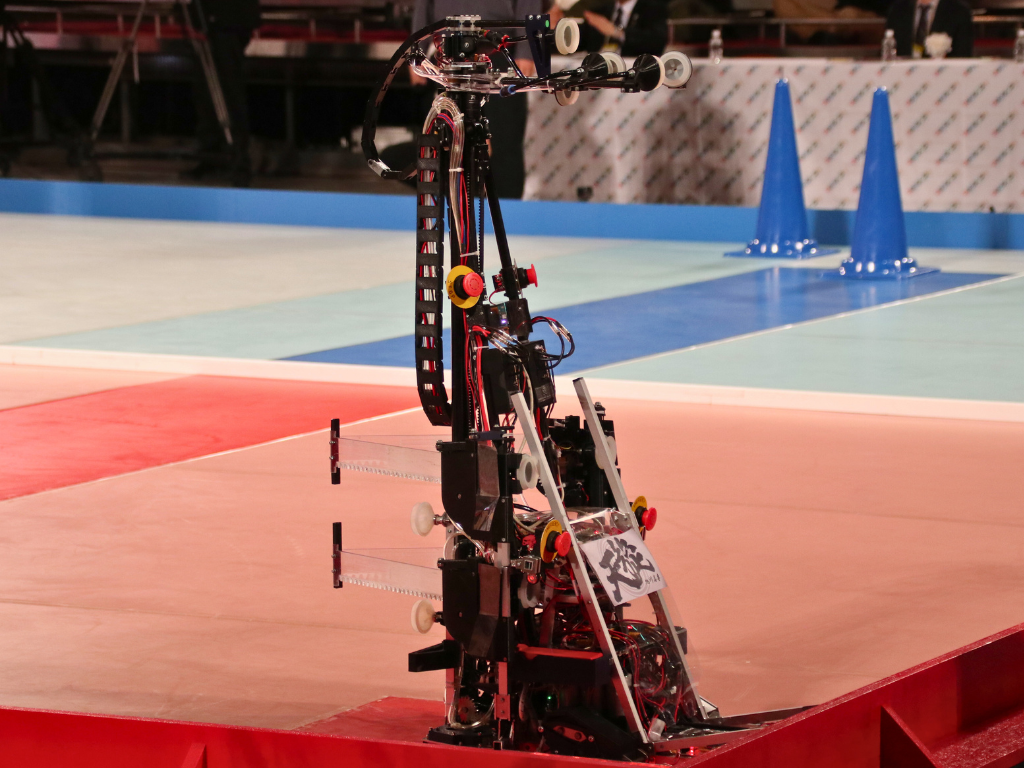
旭川高専が製作したロボット。高速回転を可能にするために無駄を極限まで削ぎ落としたスリムなデザインとなっている。

セッティングタイムで構築したゲートをゲートエリアに運ぶ様子。毎試合、ボックスが崩れる危機を一切感じさせない抜群の安定感を誇り、大会随一の運搬技術を披露した。
プロジェクト名:天旋(テンセン)
優勝は、独創的な戦略で会場を沸かせた旭川高専でした。
多くのチームがゲートの「高さ」を追求する中、ルールの本質を深く理解し、「定常円旋回(※)」によるゲート通過得点の最大化という、極めて独創的な戦術を採用しました。
この戦略は、共有ボックスに依存しないことで相手チームに左右されない安定した得点力に主眼を置いたものです。具体的には、ロボットが競技前のセッティングタイムで組み上げたゲートをゲートエリアへ素早く運び入れます。そして、競技時間内で許される限り、チームメンバーが乗った台車と共にロボットが高速で円旋回を繰り返し、ゲート通過による得点を積み重ねる戦法を採用しています。
事前にゲートを構築する戦術自体は予選大会から一貫していましたが、予選では2m40cmのゲート構築に挑んだものの、試合中に崩壊する事例もあり、安定性に課題を残していました。そこで本大会では、敢えて高さを2m10cmに設定し、その分、ゲートを素早くゲートエリアへ移動させ、高速回転の時間を確保するという、賢明な戦略シフトを行いました。
予選大会ではまだその全容を公にはしていなかった、この高速回転による得点最大化という革新的な戦術が、全国大会で初めて披露された際、その斬新さと完成度は、対戦チームと観客の双方に強烈なインパクトを与えました。
この戦略を実現するため、ロボットの機構にも工夫が凝らされています。ゲートを崩さずに運ぶため、薄く柔軟な歯車状の機構でボックスを持ち上げ、速さと安定性を両立させました。高速回転時には、移動用のキャスターが浮き上がり、回転専用の足回りに切り替わる特別な機構を搭載していました。
勝利には、搭乗者の献身的な貢献も不可欠でした。「高速回転」というマシンの特性を極限まで引き出すため、搭乗者はまるでF1レーサーのようにストイックな体重管理を徹底し、半年間で5kgもの減量に成功しました。また、高度な操縦技術の習得にも力を注ぎました。旋回時には、重心位置を一定に保ち、その上でバイクがコーナーを曲がる時のように重心を内向きの半径方向に移動させる技術を体得しました。さらに、座席を自宅のゲーミングチェアと同じ角度に設計することで、高速回転時でも常に安定した体勢を維持しました。
本選では、1回戦から決勝まで毎回2m10cmのゲートを安定して構築し、50回以上もの高速回転を披露しました。準備、運搬、回転という一連の動作は、まるで完成されたルーティンのように美しく、競技に最適化された無駄のない機能美を感じさせました。決勝戦での、高さの熊本高専とアイデア(回転)の旭川高専という、対極的なチーム同士の戦いも大会のハイライトとなりました。
旭川高専の勝利は、まさに「ルールハック」の好例と言えます。そこには、ルールの本質を見抜く深い洞察力と分析力、常識の枠を外して新しい道筋を発見する常識にとらわれない発想力、そして、「どうすればルール内で実現可能か」を突き詰めた論理的思考が表れています。これは単にルールの盲点を突いたものではなく、対戦相手が高いゲートを効率的に作れば勝敗が覆る可能性も残された、絶妙な競技的バランスの上に成り立っていました。競技性を一方的に損なうのではなく、あくまでルールの枠内で最高の効率を追求したその姿勢は、ルール制作者の想定すら超えたであろう、非常に巧妙で知的な戦略でした。
固定概念にとらわれない発想力、それを実現する高い技術力、そして搭乗者自身の少なからぬ自己犠牲の精神が組み合わさり、旭川高専は見事、優勝という栄冠を勝ち取りました。
※速度や旋回半径を一定に保った状態で、円軌道上を旋回し続ける運動のこと
アイデア賞:国立 明石工業高等専門学校 [兵庫県]
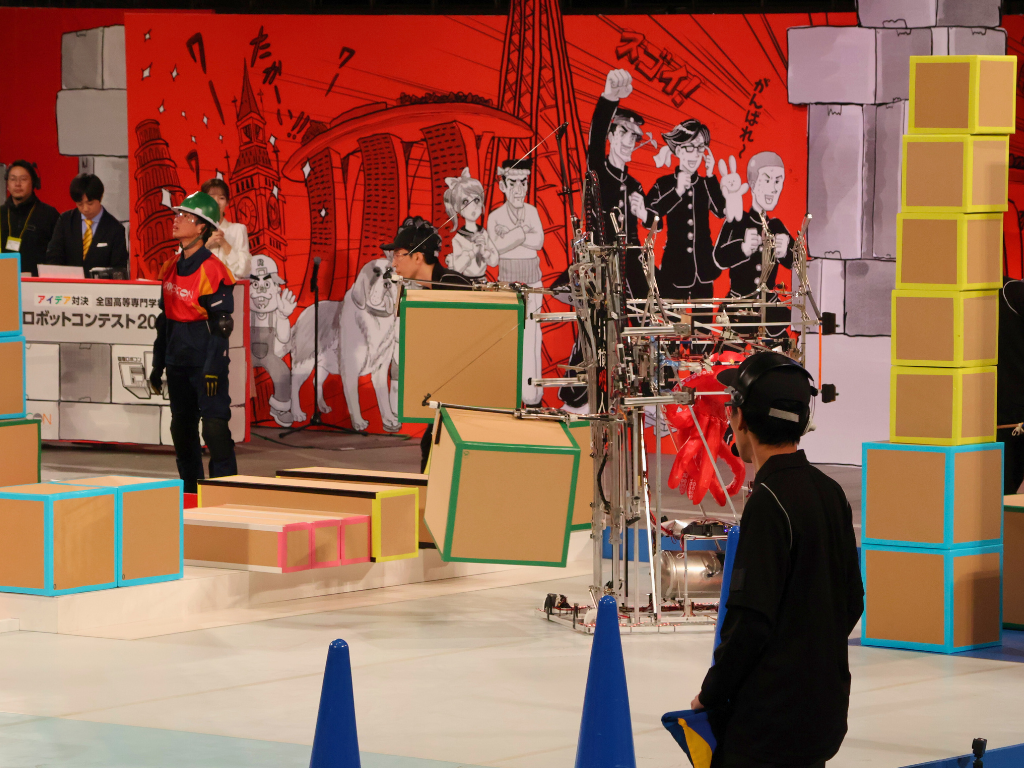
専有ボックスエリアからいち早くボックスを掴み取る姿。柔軟なアームを器用に操作し、獲物を捕らえるタコのように瞬時にボックスを確保している。
19個のボックスを一気に持ち上げてゲートを完成させる様子。移動中、ボックスがぐらつくたびに観客は息を呑みましたが、見事完成した瞬間、会場からは割れんばかりの拍手が送られた。
プロジェクト名:箱積明人(スタックメイト)
他に類を見ない独創的な発想を実現したチームに贈られるアイデア賞には、明石工業高等専門学校が選ばれました。プロジェクト名「箱積明人(スタックメイト)」は、相手より高いゲートを構築することを徹底的に追求したロボットです。
本機は、3.0m/sで俊敏に走行し、まるでタコの足のように独立して動く2本の腕で共有ボックスエリアに素早く移動し、ボックスをいち早く掴み取ります。最大19個ものボックスで構築されたゲートを一気に持ち上げて運搬し、さらにレーザーを使った正確な位置取りにより、3mを超えるゲートを安定して積み上げられるのも大きな特徴です。地区大会では2m80cmだったゲートの高さを、全国大会では1試合目3m70cm、2試合目3m20cm、準々決勝で再び3m70cmへと伸ばし、専有ボックスエリアから巨大なゲートを運ぶシーンは大迫力で大いに会場を沸かせました。
準決勝では、破竹の勢いで強豪チームを次々と破っていた旭川高専との対戦となり、長方形の大きなボックスを立てて高さを稼ぐ、これまでにない作戦に挑み、勝利を目指しましたが、惜しくも失敗に終わりました。それでも、共有ボックスエリアのボックスを迅速に確保し、高層ゲートを何度も完成させたパフォーマンスは強い印象を残しました。
アームの独創的な機構やレーザーによる精密な位置取りなど、傑出したアイデアの数々が高く評価され、見事アイデア賞を受賞しました。
技術賞:国立 奈良工業高等専門学校 [奈良県]
奈良高専が製作したロボット。吸盤とアームを巧みに連携させ、高精度なボックス運搬と安定したゲート構築を実現した。
ゲートを構築するロボットの様子。左右の傾きがなく、極めて安定したゲート構築を披露し、その高い技術的精度を示した。
プロジェクト名:金剛(コンゴウ)
技術的な完成度の高さが評価される技術賞は、奈良高専が受賞しました。
奈良高専は、代々の先輩から継承されている「シンプルイズベスト」という哲学に基づき、純粋な技術力による速さと安定性を追求しました。戦略は、より高いゲートを立てるというオーソドックスなものであり、最初のセッティングタイム中に柱を作っておき、共有ボックスから回収したボックスと組み合わせてゲートを完成させるという手順を実行しました。
ロボットは金剛力士像のようなどっしりとした安定感を持ち、特に自動制御技術の導入が際立っていました。この技術は、共有ボックスエリアからボックスを回収するフェーズで真価を発揮します。ロボットに搭載されたコンピュータが、揺れが少なく、かつ最短距離となる最適な経路を瞬時に計算することで、試合開始と同時に、どのチームよりも機敏なボックス回収を実現しました。また、吸盤を巧みに使って細長いボックスを縦に建てるなど、随所に高い技術力が光っていました。
本選では1回戦で3m80cm、準々決勝でも3m80cmと、3mを超えるゲートを2度も完成させる抜群の再現性を披露しました。しかし準々決勝では、ゲートを完成させたものの、後に優勝した旭川高専に得点で及ばず敗退となりました。
旭川高専との試合後、チームメンバーから出た「僕たちは本当に負けたのでしょうか」というコメントは、非常に印象的でした。この発言は、彼らがひたむきに技術の研鑽に取り組み、純粋な技術的性能、すなわち「より速く、より高く積む」という、ルール制作者が主眼としたであろう主要な技術領域では優位性を持っていたにもかかわらず、最終的な競技の得点では及ばなかったという、技術者としての深い葛藤を垣間見せるものでした。
対戦した旭川高専は、彼らとは敢えて違う戦略を選び、競技のスコアリングルールの特徴を最大限に活用した異なるアプローチで勝負に挑みました。その結果、奈良高専は、主眼とされた技術領域においては優位に立ちながらも、競技という枠組みにおいては、一歩及ばなかったのです。技術力では上回りながらも結果に結びつかない状況は、一部の観客に、市場戦略等の俯瞰的な戦略を欠いたために、日本の高い技術力が世界市場での成果に繋がらなかった「失われた30年」を想起させたことでしょう。
審査員からは、「きびきびとした足回り、安定した運搬機構、ボックスをくみ上げる工程の一つ一つに無駄がなく、完成したゲートの形は、大会随一の美しさ」と高く評価されました。3m80㎝のゲートを2度も完成させたその高い技術力が観客を魅了し、技術賞の受賞に至りました。
デザイン賞:私立 国際高等専門学校 [石川県]
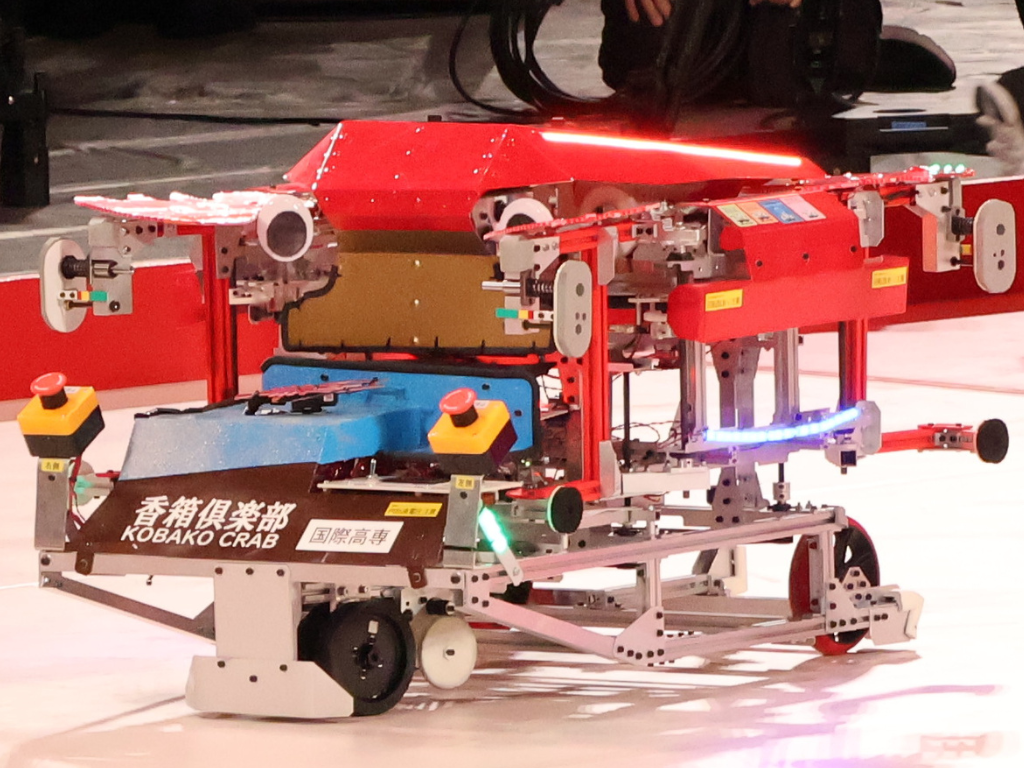
国際高専が製作したロボット。前方の黒い車輪が擬似的な一輪駆動を担っており、走行速度・走行方向をコントロールしている。
逃げるカニを追いかけるユニークな追走劇は、競技の緊張感とユーモアが混ざり合い、会場を大いに盛り上げた。
プロジェクト名:香箱倶楽部(コウバコクラブ)
機能的な美しさや装飾に秀でたロボットを作ったチームに贈られるデザイン賞は、国際高等専門学校が受賞しました。
全国大会に出場するチームの多くは、プロジェクト管理、設計、加工、プログラミング、操縦練習といった、多岐にわたる専門的なタスクを分担して開発を進めるため、数十名規模であるのに対し、同チームのロボット開発は、僅か4人という少数精鋭体制で行われました。そのため、意図的に仕組みを複雑にせず、簡潔で要素数を減らした設計方針のもと、開発を行いました。 駆動機構は、多くのチームが3輪や4輪を採用する中で、敢えて擬似的な1輪駆動を選択しました。1つの車輪の向きを変えながら走行と旋回を繰り返すことで、コンパクトな構造のまま自在な移動を実現しています。加えて、自動車に用いられるディファレンシャルギア(※)をチェーンで再現した機構や、ボックスを掴む力を色付きの板で判定する仕組みなど、シンプルでありながら工夫の詰まったメカニズムが随所に盛り込まれていました。アームを伸ばしてブロックを持ち上げる際に、目がくるくる回るギミックも印象的で、地元の名物であるカニを思わせる愛らしい外観と相まって、観客の視線を集めていました。
試合では、コンセプトどおり「積み上げないけれど、確実に運ぶ」ロボットとして、全ての試合でゲートをしっかり完成させました。併せて、逃げ出したカニを魚市場(うおいちば)の人が追いかけるという楽しいストーリー性や、ボックスを運ぶ際に目がくるくる回る遊び心あふれる演出が、観客の心を鷲掴みにしました。
僅か4人という少人数で独自の設計思想を「機能美」として昇華させた点や、確かな技術力とユニークな演出で「独自の世界観」を表現し、会場をひと際盛り上げた点が高く評価され、デザイン賞に選ばれました。
※ ディファレンシャルギア:自動車がカーブを曲がる際、左右の駆動輪に生じる回転数の差を吸収し、スムーズな旋回を可能にするための装置の総称。
アイデア倒れ賞:国立 鈴鹿工業高等専門学校 [三重県]
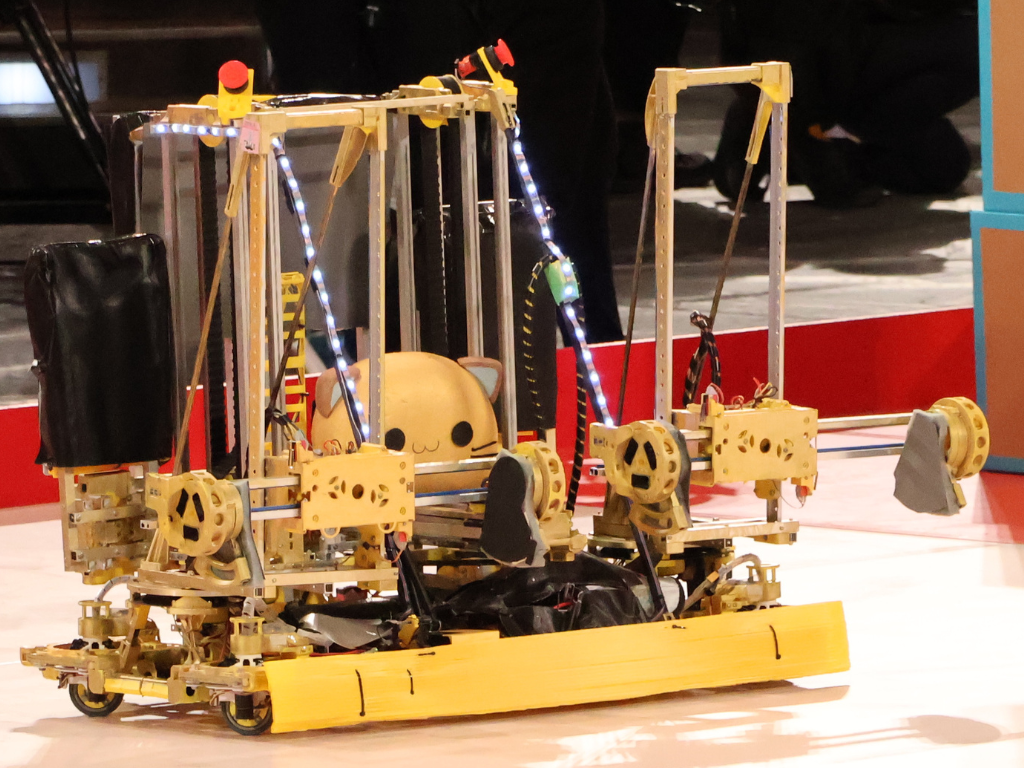
鈴鹿高専のロボット。神々しい金色の観音像を想起させる筐体と、愛らしい猫の顔という、厳かさとユーモアが融合した唯一無二のデザインである。

ゲートを構築する様子。セッティングタイムで作成したゲートをゲートエリアまで運搬した後、柱を上昇させ、柱の下に出来た空間に、アームが観音開きのように内側から外側へ扇状に回転するギミックで、共有ボックスを柱の下に挿入する。これにより、ゲートの高さを稼ぐ戦法を実現する。
プロジェクト名:鈴観音(スズカンノン)
アイデアは優れていたものの、その真価を十分には発揮出来なかったチームに贈られるアイデア倒れ賞は、鈴鹿高専が選ばれました。
鈴鹿高専は、セッティングタイム中にゲートを作り、共有ボックスエリアから取得したボックスをそのゲートの下に入れ込むことで、より高いゲートを完成させるという戦略を立てました。ロボットは、金のフォルムに猫の顔というユニークな外観を持ち、アームが伸びる様子が千手観音のようにも見える特徴的な機構を搭載していました。ゲートの柱を上げ、観音開きのようにしてボックスをアームで入れ込む設計でした。
強豪チームがひしめく全国大会において、鈴鹿高専は、ルール上、得点に繋がらない「台車に2人が乗る」という他のどのチームも挑まなかったハードルに挑みました(※)。この「魅せて勝つ」という哲学や、高専生らしい遊び心を感じさせる独創的なギミックでゲートを構築するオンリーワンなロボットは会場の注目を集めましたが、本選では残念ながら目標としていたゲートの通過は叶いませんでした。
審査員からは、「2人乗りは、ルール上、何の得点にもならないですね。まさにロマンへの挑戦です」と、得点に直結しない「ロマン」へ敢えて挑戦した姿勢が高く評価されました。この挑戦的な試み自体は素晴らしかったですが、残念ながら結果に結びつかなかった点が、アイデア倒れ賞に相応しいと評価され、受賞に至りました。
※ルール上、台車には一人だけ搭乗すれば良い。二人搭乗しても、得点は加算されない。
おわりに
今回のロボコンテーマ「Great High Gate」は、ロボットが自ら高いゲートを構築し、さらに人を乗せた台車と連結してそのゲートを通過するという、すこぶる難易度の高い競技となりました。
ゲートの安定的な構築、人を乗せた台車の安全かつ確実な搬送、そしてゲート通過による得点獲得という一連の動作には、これまでの大会以上に精密な設計と高度な制御技術が求められました。
この難題に高専生たちは、ルールの公開から文字通り寝食を忘れるほどの情熱を注ぎ込み、日頃から磨いてきた発想力と技術力を存分に発揮し、真正面から向き合い続けました。その真剣なまなざしと、試行錯誤の末に生み出されたロボットの一挙手一投足は、観客に強い感動を与え、ものづくりへのたぎる熱意を改めて印象づけるものでした。
試合直後のインタビューで、「今日までロボコンしかしてこなかったので、さしあたり明日から何しようかなと…」というコメントを残した学生がいました。これは、5月のルール公開以来、課業の傍ら、平日の夜間はもちろん、週末も、そして長期休暇をも返上し、全身全霊を製作に注ぎ込んできた苦労と、それ以上に計り知れない充実感を端的に物語っています。おそらく、このコメントは出場したすべての高専生が感じる、情熱を傾注し切った後の大きな達成感と、同時に押し寄せる清々しい寂寥感を代弁していたことでしょう。
近年の高専ロボコンは、ロボット技術の高度化と競技ルールの複雑化に伴い、多くのチームが技術の精度とスピードを極める「正攻法」での勝負となる傾向が強まっていました。 しかし、技術力だけでなく、設定されたルールの枠組みの中で、誰も思いつかない勝利の方程式を導き出す「戦略的洞察力」と「独創的発想力」もまた、この競技の醍醐味の一つです。
今大会の特筆すべき点は、まさにこの点にあります。一部のチームは独創的な発想に基づき、他の高専が目指すセオリーとは敢えて異なる技術的な仮説で優勝を目指しました。周囲と異なるアプローチは、一般的に不安を伴うものです。しかし、学生たちはその独自の発想を信じ、それを実現可能とする技術力の高さと、最後まで走り抜く強い信念を見事に示しました。この、既成概念に囚われずに道を切り拓く力こそが、今大会の大きな収穫の一つと言えるでしょう。
もちろん、例年同様、高専生が示した技術力は非常に高い水準にありました。特に、高所のゲート構造を安定させつつ、人を乗せた台車を確実に走行させるための数々の工夫は、現代社会で着実に重要性が高まる「人を安全に運ぶ」「人と協調して動く」といった、未来のロボット需要に貢献する可能性を感じさせるものでした。
難しい課題に臆せず挑戦する姿勢。アイデアを図面と機構に落とし込み、試行錯誤を重ねて形にする力。そしてチームで役割を分担し、一つの目標に向かって協力する経験。これらは、これからの社会で活躍するエンジニアにとって不可欠な資質です。今大会で得た学び、味わった悔しさ、そして得られた達成感は、出場した高専生一人ひとりの貴重な糧となり、次の挑戦や将来のキャリアへとつながっていくはずです。
次回の大会では、今回を超える新たな発想や挑戦的な技術によって、どのようなロボットが登場するのか。期待が一層高まる大変有意義な大会となりました。
※全国大会での高専生の活躍は、2025年12月14日(日) 午後2時00分から午後2時54分にNHK総合にてTV放映される予定です。
NHK-高専ロボコン:第38回全国大会
