高専トピックス

「ロボたちの帰還」を「Jump to the Future」の視点で考える
徳山高専 准教授 藤本 浩 先生

2024年度高専ロボコンのテーマは、「ロボたちの帰還」となり、月面探査機SLIMなどをモチーフに設定されたであろう難易度の高い競技ルールとなりました。
4月17日に2024年度の高専ロボコンのテーマ「ロボたちの帰還」が公開されました。ロボットが接地禁止ゾーンを越えて狙った場所に着地、オブジェクトを回収しそれを元の場所に持ち帰るという競技で、月面探査機SLIMの「ピンポイント着陸」や、はやぶさ2の「サンプルリターン」などをモチーフに設定されているようです。
この記事が公開される頃には全国の高専生のアイデアは既にロボコン事務局の方へ提出が完了していることと思いますので、あえてこのタイミングで過去唯一ロボットを飛ばすことを競技ルールとした1999年の「Jump to the Future」(ジャンプ・トゥ・ザ・フューチャー)と、この競技においてロボコン大賞に選んで頂いた「Fly Do ポテットS」の製作背景を通して「ロボ達の帰還」が如何に難易度の高い競技であるか考えてみたいと思います。
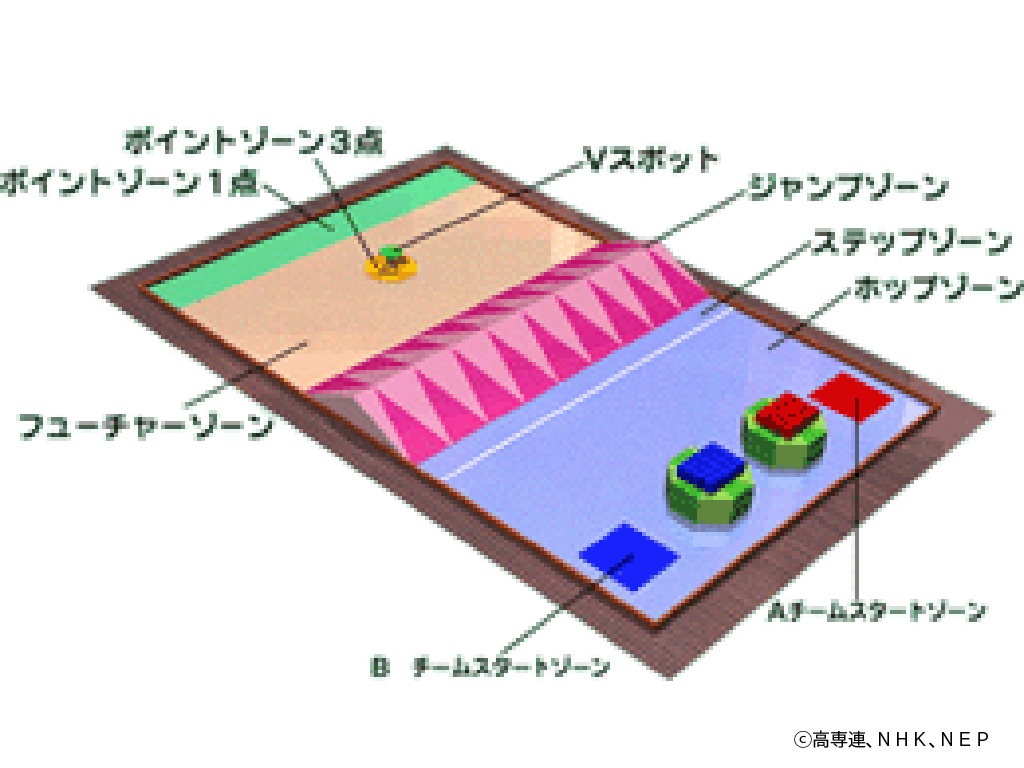
1999年の「Jump to the Future」(ジャンプ・トゥ・ザ・フューチャー)のフィールド図面。2024年度高専ロボコンのテーマの「ロボたちの帰還」と同じく、過去唯一ロボットを飛ばす、難易度の高いルールでした。
先に「Jump to the Future」競技について少し触れておきます。この競技は競技フィールドに置かれた15個の「箱」をフィールド中央にある高さ700mm幅3000mmの山に触れずに飛び越えてポイントゾーンへ運び、3分間でポイントゾーンにいかに多く「箱」を運ぶか、または「Vスポット」と呼ばれる高さ250mmの台に「箱」を置いた時点でそのチームの勝ちとなります。 そのため、この競技においては、如何に素早く山に触れずにポイントゾーンに到達できるかが勝敗を分けるキーポイントになります。
これより前の大会ではロボットを飛ばした競技はなかったため、飛ばし方も新たに考える必要がありました。加えて最大の問題は着地した後にロボットが壊れるのではないかという点でした。従って、これらをどのようにして克服するかがロボット開発の焦点となりました。
その際に出たアイデアとしては、ロボットを落下(着地)の衝撃から守る素材で作った球体で囲むことや、ハングライダーのような三角の翼を設ける、パラシュートを備える、そもそもロボット自体を軽量化した上で壊れない程度の剛性を持たせて投げるなどがあり、これらについて様々な検討がなされました。
しかし、ロボット自身を小型軽量化して衝撃吸収素材をまとわせるにしても、着地後に170mm×230mm×220mmの箱を扱う機能を持たせるには小型化に限界があり、試合を重ねる毎に壊れる確率も急速に高くなると予想されること。ハンググライダーのように滑空させるにしてもロボットの制限サイズ程度の翼面積では必要な揚力を期待できないこと。パラシュート方式にしてもかなり高くまでロボットを打ち上げないと着地までにその効果が得られないこと。など何れのアイデアも常識の方法では行き詰まってしまいました。

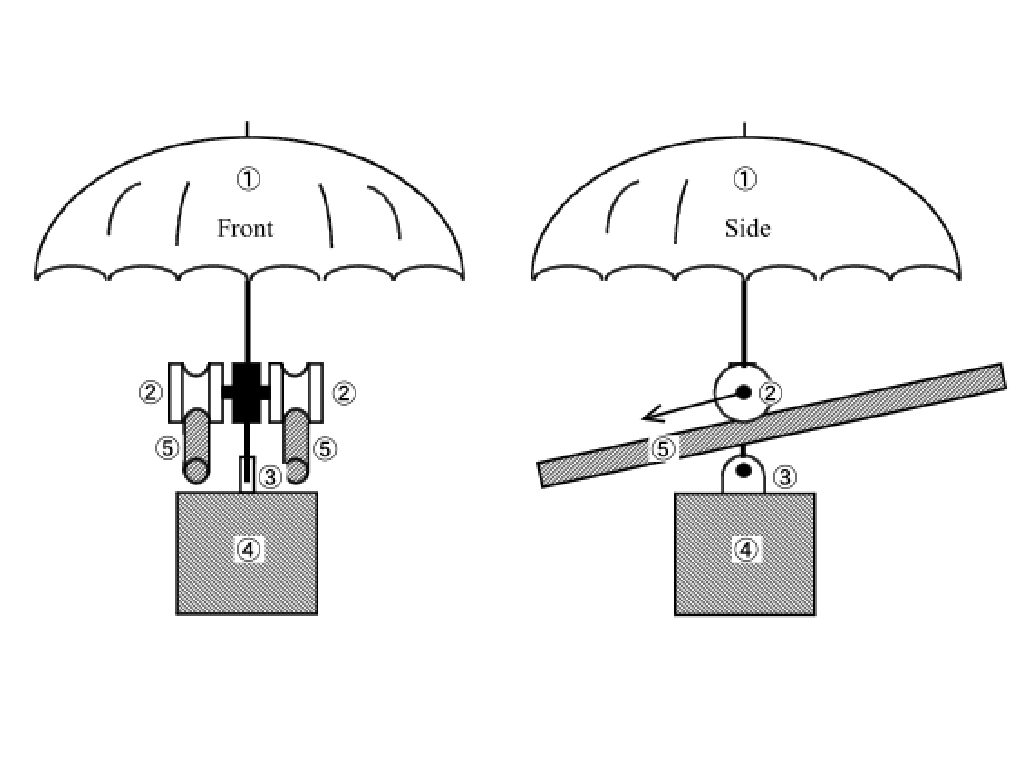
飛ばし方や着地方法などこれまでにない課題を、傘のアイデアにより克服し、この大会で見事にロボコン大賞となった「Fly Do ポテットS」。
そのような中、メンバー達とアイデアの話をしているときに私はふと幼少期に傘を持って棚田から飛び降りて遊んでいたことを思い出しました。小学生の頃は痩せていたこともあり体重はロボットの総重量とさほど変わらない30Kg程度だったと思いますが、体感的に落下速度を軽減することができたように記憶していました。
早速そのことをメンバーに伝えたところ、メンバーの殆どが同じく傘を持って飛び降りた経験があったことから、傘を使えば翼とパラシュートの機能を両立できるのではないかと全員のイメージが一致して、これをアイデアとしたロボットの開発がスタートしました。
まず取り組んだのは、利用する傘でどの程度の落下減速効果があるのか、定量的ではなくても目視により感覚的に落下の状態を把握したかったので、校舎の2Fから屋外へ延びる高さ8mの渡り廊下から、子機を想定した重さの重りを付けた雨傘を何度も落下させてその様子を観察しました。
その結果、雨傘では落下の減速は見られたものの満足できるほどのものではありませんでした。落下の途中で傘がお猪口のようにひっくり返ることもしばしばありました。原因は傘の面積と骨の強度にありましたが学生達は実験を重ねるうちに徐々にこのアイデアに対する自身を失い、このアイデアを選択したことを後悔しているように私には見えました。
ある時、「このままこのアイデアを続けて打開策が見つからなければロボットの完成はないので別のアイデアに切り換えようか。」とメンバーに打診したところ、帰ってきた返事は「このアイデアで行きます。」でした。
実験を繰り返している様子や表情から諦めかけていると思っていたこともあったので、諦めていない強い意思表示が帰ってきたので正直驚きました。それから先は、迷いなくアイデアの実現に向けての試行錯誤を繰り返しました。
傘を使うアイデアの実証実験を行いました。子機を想定した重さの重りを付けた雨傘を何度も落下させてその様子を観察しました。実験では良い結果がなかなか出ませんでしたが、メンバーの強い意志であきらめず試行錯誤が続きました。
傘による落下の減速効果はこれまでの実験で確かめられていましたので、あとはこのアイデアの要件を満たす傘をどう調達するかということでした。
もし、世の中に存在しなければ自作することも覚悟していました。そのような中、たまたまゴルフ好きの友人宅にお邪魔する機会がありました。すると玄関先に通常の雨傘の1.5倍はある大きな傘が立て掛けてありました。
その傘はゴルフ用の傘で、骨組みはガラス繊維とカーボンファイバーで構成されていて軽い上に非常に丈夫にできていました。ゴルフをしない私にとってそれは「棚からぼた餅」的な出会いではありましたが、それを目にしたときにアイデアの壁を一つ乗り越えた高揚感がありました。
早速、メンバーにこの傘の存在を伝えて入手したゴルフ傘での落下実験を行ったところ、傘はお猪口になることなく落下の減速に対しても高い効果を発揮しました。こうしてメンバーの脳裏にはロボットの完成イメージが描かれ、一気にロボットの完成に向かって突き進みました。
ついに完成したロボットは傘を翼とした子機(8Kg)を親機に搭載しておき、ポンプで加圧した空気を自作のエアシリンダーに送って丸ゴムチューブを引き延ばした後に、そのゴムの収縮力を利用して子機を打ち出す方式となりました。
この時、伸張したエアシリンダーは子機の発射用スロープともなります。傘を翼として利用した実例を他で見聞したことがなかったことから、打ち出された子機の飛行姿勢がどのようになるのか大きな不安がありましたが、実験は予想以上に安定した飛行姿勢と衝撃の極めて少ない着地を見事に実証してくれました。
飛行姿勢の安定化の要因はもう一つあって、当時は有線コントロールだったので有線の重量が飛行姿勢に与える影響が問題となりますが、親機、子機それぞれに電源を設けて非常に軽い樹脂製の光ファイバーによる通信線1本で両機をコントロールするようにしたため、子機の飛行姿勢を損ねることはありませんでした。
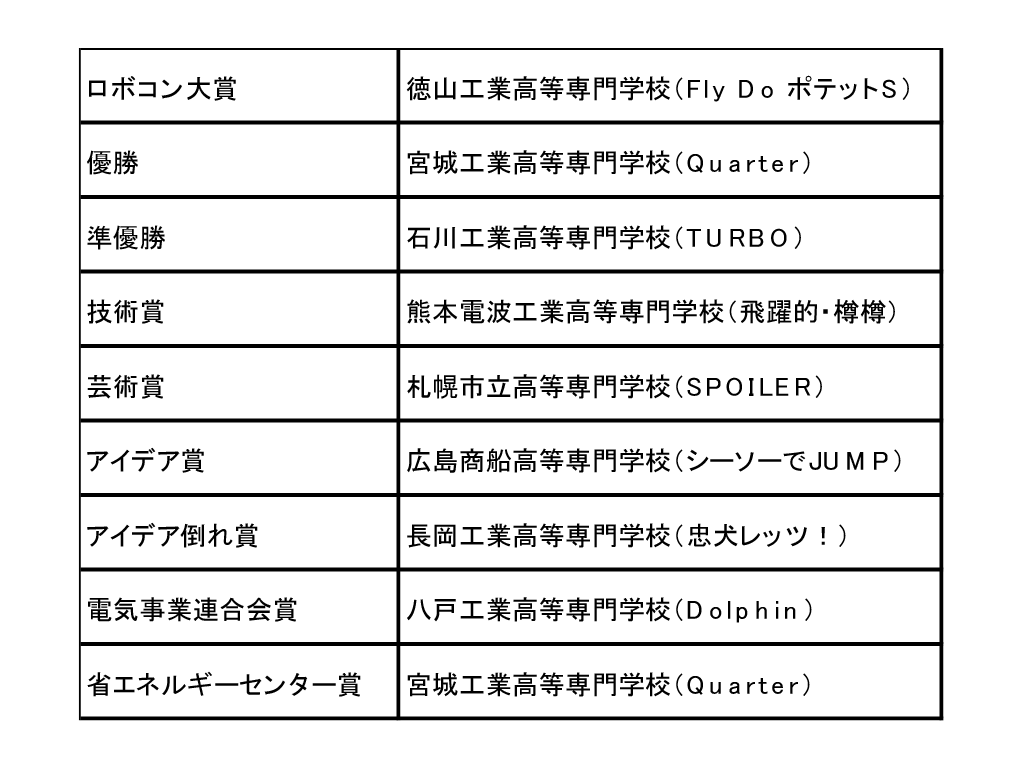
第12回全国大会結果(1999年)。「Fly Do ポテットS」は、全国大会では優勝出来ませんでしたが、傘のアイデアが評価されて栄えあるロボコン大賞に選ばれました。
「Fly Do ポテットS」は地方大会で圧勝、全国大会では乾燥が原因と思われる箱サイズの縮小に、着地をした際に子機が抱えていた箱が前方に滑り出してしまい、優勝には手が届きませんでした。
しかし、傘を利用したアイデアが評価されてロボコン大賞に選ばれました。あの時、学生達が傘のアイデアを諦めていたらこの受賞はありえませんでした。いつもながら学生達の諦めない気持ちには頭が下がります。
さて、話を「ロボたちの帰還」に戻します。「Jump to the Future」と大きく違うのはロボットが接地禁止ゾーンを超えるところまでは良いのですが、再び接地禁止ゾーンを超え戻ってくるところにあります。私の経験ではロボットに回転翼が使用できない、ペットボトルに蓄積した圧縮空気の利用ができないなどルール上の機構的な制約があるため、先に紹介したようにロボットは障害物を飛び越えることを最も苦手とします。
加えて1チーム2台以上のロボットを製作するルールとなっています。今年度より地方大会の開催期日が早まり、最も早いところでは9月22日と高専では夏休み中に開催されます。夏休みの製作期間が短くなるのは痛手で、メンバーの少ない高専のチームは時間制約との戦いともなります。過去に例を見ない程の難易度の高い競技ルールを如何に攻略するか、常識に捕らわれない発想の転換が求められる競技に高専生はどんな答えを見いだすのか、本記事が少しでも参考になれば幸いです。

NHK学生ロボコンは国際大会であるABUロボコンの予選会でもあります。これらの大会は、スピード重視であり優勝ありきである大会に対して、高専ロボコンはアイデア勝負というところです。
学生たちの奇抜なアイデアによって、高専ロボコンはいつの時代も新鮮な大会となっています。
この記事を執筆している最中に大学生向けに開催されるNHK学生ロボコン2024の配信がありました。高専ロボコンと大きく異なるところをあえて言うなら「優勝しなければ価値が無い」というところです。
従って、競技はスピード重視であり高専ロボコンよりも奇抜なアイデアが出にくいと言えます。しかし、これらの技術はスピードと高度な制御技術を盛り込んでいることから社会実装の実体に近いとも言えます。
2002年からNHK学生ロボコンは国際大会であるABUロボコン(ABU Asia-Pacific Robot Contest)の予選会を兼ねることになりました。この大会で優勝すればABUロボコンに駒を進めることができるのですが、優勝を争う常連の大学として、豊橋技術科学大学(以下、豊橋技科大)(優勝9回)、東京大学(以下、東大)(優勝7回)があります。
今年は豊橋技科大が東大を破って優勝に輝き、NHK学生ロボコン初の3連覇を成し遂げました。それぞれのチームのロボットはいずれも素晴らしく優劣付けがたいロボットでした。勝敗を分けたのは連戦を勝ち抜いた末のロボットの安定感の善し悪しでした。
優勝した豊橋技科大はその構成メンバーの多くに高専ロボコン経験者がいます。私のチームの歴代OBもその中の一人として活躍してきました。
ある時、帰省したOBとで東大チームと豊橋技科大チームとの違いについて話題にしたことがあり、それぞれが勝っているところは何かと訪ねたところ「東大は偏差値と財力、豊橋技科大は高専ロボコンでの経験値。」と答えたことがあります。
少し話題を面白くした面もあると思いますが、今年の優勝戦を見て改めてこのときの話題を思い出しました。実践を学びとする経験値が勝敗を分けたように私には見えました。

藤本 浩
徳山工業高等専門学校 機械電気工学科 嘱託准教授
創造・特許教育を担当、二重螺旋ポンプ、電動車椅子用着脱可能な安全停止装置、乳幼児うつぶせ寝検出装置など数々の開発及び応用と、高専ロボコンには1991年開催の第四回大会から指導者として参加し、全国大会優勝、準優勝、ロボコン大賞、技術賞、アイデア賞等幾多の実績を有する。
『SolidWorksによる3次元CAD -Modeling・Drawing・Robocon』(共著)
(掲載開始日:2024年7月26日)