高専トピックス

日本原子力研究開発機構と廃止措置人材育成高専等連携協議会の主催により2016年に始動した本大会は、今年で第10回の節目を迎えました。東京電力福島第一原子力発電所の廃炉作業は、完了までに30年から40年という長い歳月を要する国家的なプロジェクトです。文部科学省の事業成果を踏まえて実施される本大会は、その遠い未来までを見据え、現場を支え続ける次世代の技術者を育成することを最大の目的としています。
本大会の大きな特徴は、廃炉という現実の社会課題を題材としたPBL(問題解決型学習)の実践の場となっていることです。学生たちは、ロボット製作という能動的な学びを通じて、メタ認知能力を高めるとともに、事象に潜む本質を見極める「課題発見力」と、それを打開する「解決力」を実践的に養います。机上の理論だけでは決して身につかない、実際の社会課題に取り組む体験こそが、今後の社会を担う若者たちにとって重要な財産となります。

第1回開催から毎回会場となる、日本原子力研究開発機構 楢葉遠隔技術開発センター 入口前
今大会の競技テーマは、昨年に引き続き「福島第一原子力発電所原子炉格納容器(PCV)内部調査」です。テーマこそ同じですが、用意された競技フィールドは前回と異なる構成となっており、廃炉工程の中でも極めて重要かつ困難な課題への対応力が試されます。現場適用や共同研究の可能性も秘めたこの高度なミッションに対し、参加チームは独自のアイデアと技術力を駆使して挑みました。
2025年12月20日(土)「日本原子力研究開発機構楢葉遠隔技術開発センター(福島県双葉郡楢葉町)」にて開催された今大会には、国内高専16チームおよびマレーシア工科大学、KOSEN-KMITL(タイ高専)を含む計18チームが集結しました。会場は、技術交流の場としての和やかな雰囲気と、競技特有の緊張感が交錯する熱気に包まれました。本稿では、数ある力作の中から厳正な審査を経て見事表彰された4チームの成果を中心に、高専生たちの熱い挑戦の軌跡をお届けします。
(掲載開始日:2026年1月14日)
ルール概要

原子炉建屋内の環境を模した、階段や配管トンネルなどの障害物が待ち受ける競技フィールド全景。
廃炉創造ロボコンの競技課題は、福島第一原子力発電所の原子炉格納容器(PCV)内部調査を模擬しており、X-1ペネトレーション(※)からPCV内部にアクセスし、堆積物に見立てたオブジェクト(以下 "堆積物" とする)を回収して、元の場所まで戻ってくる任務に挑戦します。
今回のターゲットとなる堆積物は、一辺30mmのアクリル製立方体と、形状不明の固形物(30mm角程度)の2種類が想定されています。 参加チームは、X-1ペネトレーションを模した配管(直径600mm)内から、製作したロボットをスタートさせます。ロボットは、配管を通過した後、コンクリートブロックによって挟まれた、幅0.5mの狭隘部を通り抜け、階段へと向かいます。階段直前の床面や踊り場はグレーチング(鉄で作られた格子状のふた)となっており、そこを走行した後、フロア最下部を目指し階段を下降します。その後、堆積物が配置された場所に向かって走行し、堆積物を回収してスタート位置に戻ります。
操縦者は、オペレーションエリアからロボットを直接目視できないため、カメラ映像に頼ったロボットの遠隔操作が必須となります。また、実機同様の過酷な環境を想定し、ロボット制御は有線のみに限定されます。尚、事故防止の観点からドローンの使用は認められていません。制限時間10分の実演の中で、いかに正確に課題を遂行できるかが問われます。
なお、優秀な成績を残したチームには、以下の賞が授与されます。
・最優秀賞(文部科学大臣賞)
・優秀賞(福島県知事賞)
・技術賞(国立研究開発法人日本原子力研究開発機構理事長賞)
・アイデア賞(独立行政法人国立高等専門学校機構理事長賞)
また、特別協賛企業から特別賞がそれぞれ贈られます。
※ X-1ペネトレーション:福島第一原子力発電所の原子炉格納容器(PCV)にアクセスするための開口部の一つ。
参加チーム一覧(高専名・チーム名・ロボット名・表彰名)
| 高専名 | チーム名 | ロボット名 | 表彰名 |
| KOSEN-KMITL (タイ高専) | Ken_05 | ELEPHANT・象 | 最優秀賞( 文部科学大臣賞 ) |
| 茨城工業高等専門学校 | Hirasawa Lab. | 紫峰 | 優秀賞( 福島県知事賞 ) |
| 熊本高等専門学校 (熊本キャンパス) | 熊本高専熊本キャンパスBチーム | Octa Viper | 技術賞( 国立研究開発法人日本原子力研究開発機構理事長賞 ) |
| 舞鶴工業高等専門学校 | まいづる | あけぼのⅡ | アイデア賞( 独立行政法人国立高等専門学校機構理事長賞 ) |
| 福島工業高等専門学校 | 真·神頼み | 白虎Mk-Ⅱ | 特別賞・株式会社アスム賞 |
| 福島工業高等専門学校 | 廃炉研究会 | Wakaba | 特別賞・東京パワーテクノロジー株式会社賞 |
| 一関工業高等専門学校 | 機械技術部 | 踵爪先号 | 特別賞・株式会社ビーエイブル |
| 連合(以下、高専の有志チーム) (長岡工業高等専門学校、福島工業高等専門学校、函館工業高等専門学校) | Caerula | Windia | 特別賞・東芝エネルギーシステムズ株式会社賞 |
| 大阪公立大学工業高等専門学校 | 大阪公立大学高専 ろぼっと倶楽部 | 廃炉プロジェクト1号 | 特別賞・三菱重工業株式会社 |
| 一関工業高等専門学校 | 藤原研究室 Cチーム | 歩きメデス 2025 | 特別賞・日立GEベルノバニュークリアエナジー賞 |
| 小山工業高等専門学校 | 小山高専廃炉ロボット製作オネダックチーム 2025 | Slider Back XI | 特別賞・株式会社東京エネシス賞 |
| 一関工業高等専門学校 | 藤原研究室 Bチーム | Balogun | 特別賞・株式会社アトックス |
| 熊本高等専門学校 (熊本キャンパス) | 熊本高専熊本キャンパスAチーム | 國掴 | |
| 富山高等専門学校 (本郷キャンパス) | KANEKENS | サナダくん 改 | |
| 舞鶴工業高等専門学校 | 舞鶴高専 小林研究室 | フレキシタンク | |
| マレーシアエ科大学 | KL Dynamics | Asteroid | |
| 旭川工業高等専門学校 | Reboot 人田製作所 | HITODA-Ⅱ | |
| 宇部工業高等専門学校 | E-project | ランナークレア |
最優秀賞( 文部科学大臣賞 ):KOSEN-KMITL( タイ高専 )
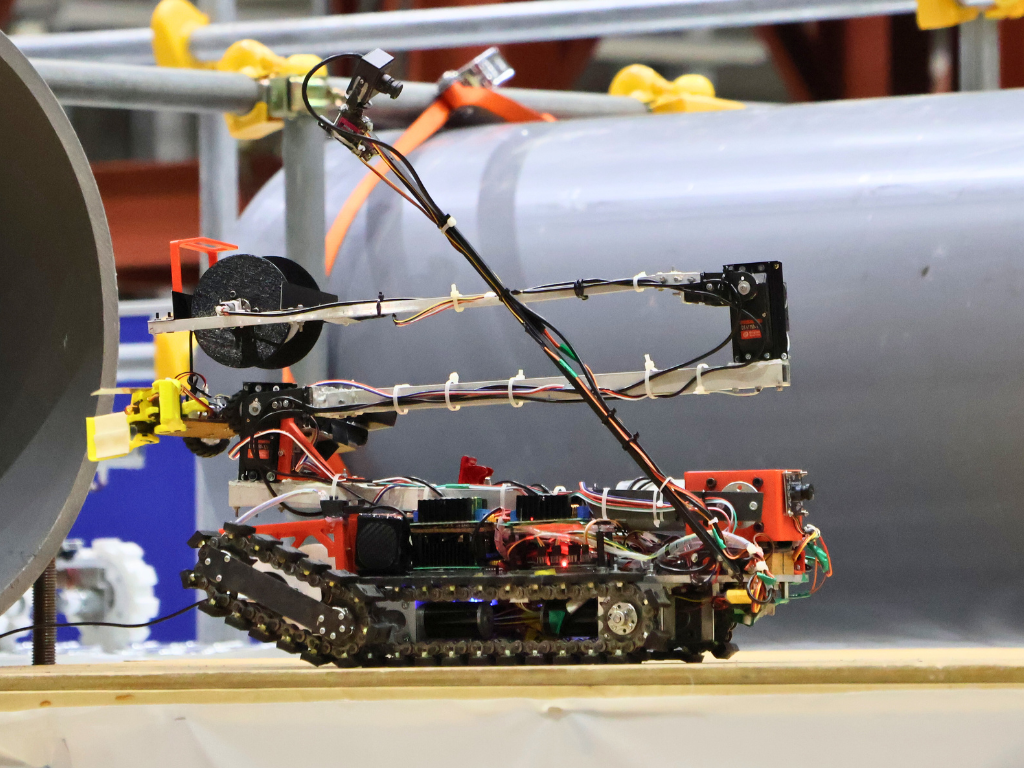
走行時は竿をたたみ、円筒内、ブロックコンクリート部分を難なく走破している。
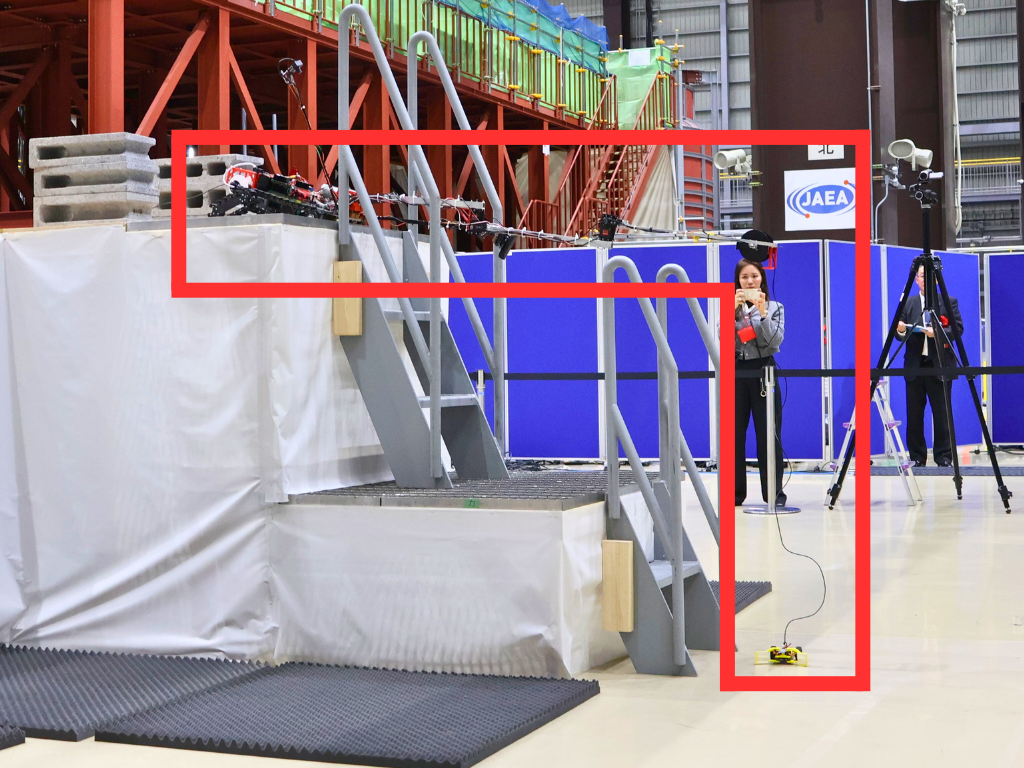
赤枠のように、ロボットは階段上から小さい回収用ロボットを吊り下げ、堆積物の回収を行う様子。
チーム名:Ken_05
ロボット名:ELEPHANT・象
第10回廃炉創造ロボコンにおいて、栄えある最優秀賞に輝いたのは、KOSEN-KMITL(タイ高専)でした。メンバー全員が2年生という若き精鋭たちが、並み居る日本の強豪校を圧倒し、海外勢として史上初の最優秀賞受賞という快挙を成し遂げました。
本チームが開発したロボット「ELEPHANT・象」は、タイの象徴である象をモチーフにしており、長い鼻に見立てた伸縮自在のアーム機構が最大の特徴となっています。特筆すべきは、堆積物回収機を先端に取り付けたアームを伸ばし、そこから糸を巻き上げるプーリーシステム(※)を採用した点です。
この仕組みにより、ロボット本体が障害物となる階段を昇り降りする必要がなくなり、高所から直接作業を行うという、極めて合理的かつ安全なアプローチを体現しました。
この画期的なアイデアを支える技術力も素晴らしく、徹底した軽量化と小型化を図りつつ、アーム展開時の安定性と高精度な制御を両立させました。
軽量アーム特有の揺れさえも計算尽くで制御するその挙動は、まるで「高台から長いリール竿を操る熟練の釣り師」を彷彿とさせる、しなやかで見事な動作でした。
また徹底した軽量化と小型化の追求は、単なる競技上の戦略に留まりません。海外校である彼らが直面する「長距離輸送」という物理的・経済的な制約を克服するための最良な選択でもありました。
輸送コストやスペースの制限をクリアしつつ性能を最大化させたこのロボットは、グローバルな流通や、災害現場への緊急搬入といった実社会で直面するであろう課題も解決しうる、競技の枠を超えた極めて示唆に富んだプロダクトとして昇華されていました。
競技本番では、この緻密な戦略は余すところなく発揮されました。多くのチームが難関に阻まれる中、彼らは制限時間を3分30秒も残して課題をクリアするという圧倒的なスピードと精度を見せつけました。その卓越したパフォーマンスには解説者からも「きっちり釣り上げた」「素晴らしい実装力」と絶賛の声が上がりました。彼らが今大会において「唯一、課題をクリアしたチーム」として、最優秀賞を受賞しました。
※プーリーシステム:滑車とロープを組み合わせることで、力の向きを変えたり、小さな力で物体を巻き上げたりすることを可能にする機構。
優秀賞( 福島県知事賞 ):茨城工業高等専門学校
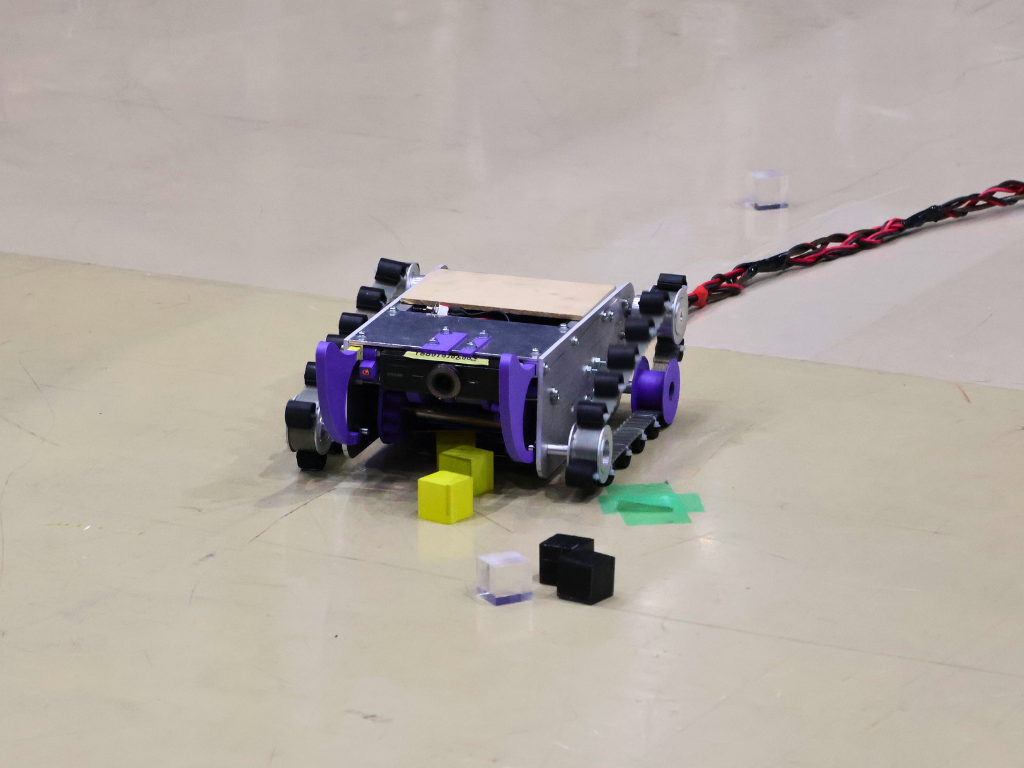
子機は、堆積物の上を通過するだけで、まるで掃除機のように物体を回収する機構を披露した。
チーム名:Hirasawa Lab.
ロボット名:紫峰
福島県知事賞(優秀賞)に輝いたのは、茨城高専の「Hirasawa Lab.」でした 。
同チームは、親機と子機の2機構で構成され、親機のお腹から子機が登場する分離機構を持ったロボット「紫峰(しほう)」を製作しました。
本機の制御システムには、パソコンのOSにLinux、ソフトウェアにROS(Robot Operating System)を採用しており、大学の研究室や企業レベルに匹敵する高度なシステム構成が特徴です 。
競技では、スタート直後から非常にスムーズかつ高速な動きを見せ、難なくブロックの間を軽快に通り抜けました。階段エリア手前からの降下においては、一度バックしてケーブルをたわませるなど、引っかかりを防ぐための繊細な調整を行いながらアプローチしました。降下後は親機から子機を展開し、順調に作業を進め、見事に4つの堆積物をロボット内部に回収することに成功しました。
しかし、堆積物回収後の帰還時、パイプへの再突入の際、入り口部分の段差で手間取り、何度も調整を試みたものの時間を消費し、惜しくもタイムアップとなりました。
解説者からは「ロボットの動き自体が非常に洗練されており、開発・調整がよく行われている」「特に前半のスピードは驚異的だった」とのコメントがありました。惜しくも完走は逃しましたが、その卓越した技術力と完成度の高さが評価され、福島県知事賞(優秀賞)に選ばれました。
技術賞( 原子力機構理事長賞 ):熊本高等専門学校( 熊本キャンパス )
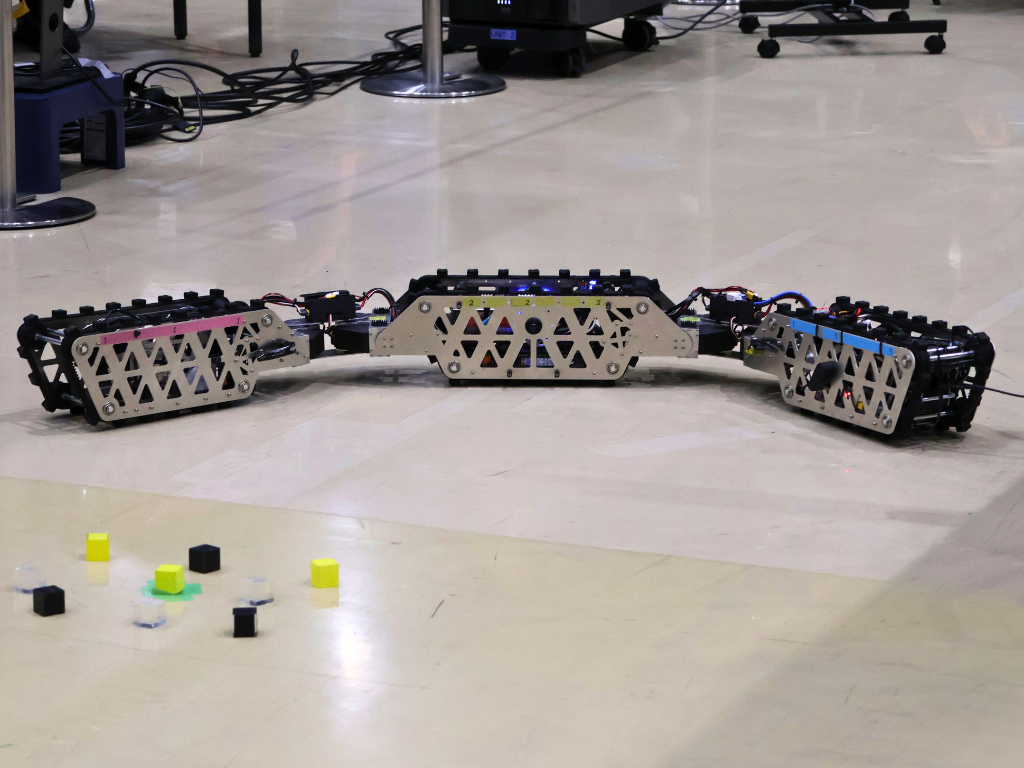
3連結のボディを柔軟にくねらせながら走行し、ターゲットとなる堆積物の元へ確実に辿り着いた。
チーム名:熊本高専熊本キャンパス ロボコン部 Bチーム
ロボット名:Octa Viper
技術的な完成度の高さが評価される技術賞には、熊本高専の「Octa Viper(オクタヴァイパー)」が選ばれました。
彼らが開発したロボットは、その名の通りヘビの一種である「ヴァイパー」をコンセプトにした独創的な機体です。ピンク、黄色、ブルーに色分けされた3つの筐体を2つの関節で繋いだ構造は、すべての機構を内部に収めることで、上下が反転しても走行を継続できる極めてタフな設計となっています。その洗練された外観は、機能美とデザイン性を両立させた「列車のよう」な姿として解説者から高く評価されました。
このロボットの真価は、複数人による操縦を円滑にするために採用されたROS2(※)による高度な制御システムにあります。その動きは、単なる連結車両ではなく、あたかも「連結バスが意思を持って険しい岩場を登っていく」かのようでした。各車両がバラバラに動くのではなく、ROS2という高度な「神経系」によって1つの生物のように連動し、路面の状況に合わせて柔軟に体の形を変えながら障害物に挑みました。
競技では、アームで捉えた堆積物を機体中央へ巻き取るように収容する技を披露しました。難所の階段では、クローラーとケーブルの繊細な均衡を操縦者が巧みに制御し、粘り強く攻略に挑みました。終了間際には解説者が「あと10秒だけ」と祈るほどの胸を熱くする展開となり、その不屈の姿勢と高度な技術力に対し、会場からは惜しみない拍手が送られました。
受賞の決定打となったのは、同校が長年培ってきたヘビ型機構の完成度と、それを実作業に結びつけた卓越した「実装力」でした。複雑なシステムを統合し、難局を打開するその姿は、まるで「熟練のアスリート」が技を披露するかのようであり、廃炉という難題に対し、研究成果を実用的な技術へと昇華させた「知恵と勇気」ある挑戦が、技術賞という栄冠をもたらしました。
※ROS2(Robot Operating System 2):ロボット開発のためのソフトウェアプラットフォームのこと。複数の部品やプログラムを効率的に連携・通信させるための「ロボットの神経系」のような役割を果たす。
アイデア賞( 高専機構理事長賞 ):舞鶴工業高等専門学校
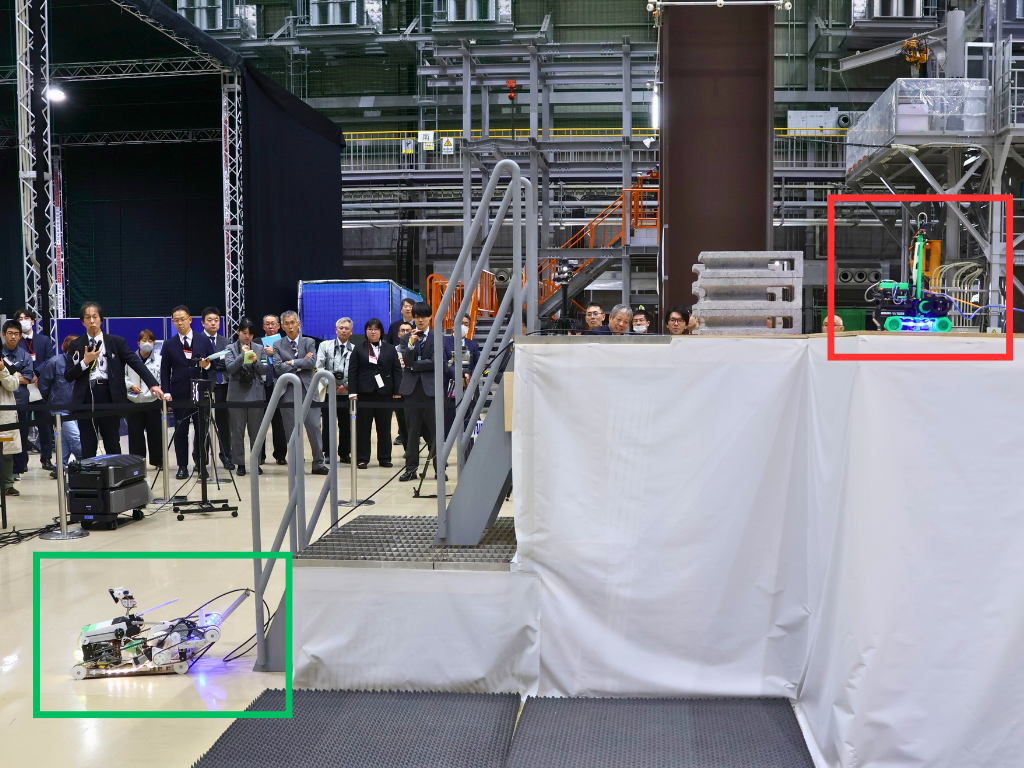
高所のステージから子機(画像赤枠)が親機(画像緑枠)を俯瞰し、巧みな連携で堆積物回収を成功させた。
チーム名:まいづる
ロボット名:あけぼのⅡ
優れたアイデアを発揮したチームに贈られる高専機構理事長賞(アイデア賞)に選ばれたのは、舞鶴高専の「まいづる」でした。
同チームは、親機と子機の2台構成のロボット「あけぼのⅡ」を製作し、子機をあえて作業用ではなく「観測用ロボット」として機能させる独創的なアプローチをとりました。
このロボットの最大の特徴は、子機がスタート地点の高い位置に留まり、高性能カメラでフィールド全体を俯瞰することで、親機のロボットの位置関係を死角なく、把握できるようサポートする点です。これにより、リスクを負って子機を動かすのではなく、親機の操作を確実にするという戦略をとりました。
また、ロボットに施されたLEDテープライトによる装飾は、見た目の美しさだけでなく、子機のカメラから親機を見た時に、機体の前後を視認しやすくするという、実用的な工夫が凝らされている点も特徴です。
競技では、スタートからスムーズに進行し、子機を配置した後に親機がケーブルを伝って降下しました。回収機構には回転ローラーと蓋が閉まる機構を採用し、確実に堆積物を巻き込んで回収することに成功しました。
しかし、回収を終えてウィンチで登ろうとした際、負荷によりワイヤーが切れるトラブルが発生し、残り1分25秒で無念のリタイアとなりました。
完走はならなかったものの、解説者からは、子機を観測に徹させる戦略について「子機を動かすリスクを負わず、親機の操作を確実にする非常に良い作戦」と高く評価されました 。また、ワイヤー切断についても「安価な部品が壊れることで高価なモーターを守った、ある意味で理にかなった壊れ方(ヒューズのような役割)である」との分析がなされ 、その設計思想の高さと独創性が評価され、アイデア賞の受賞につながりました。
おわりに
本大会を振り返り、最も鮮烈な印象を残したのは、やはり海外高専として初の最優秀賞に輝いたKOSEN-KMITL(タイ高専)の目覚ましい活躍でした。彼らが見せた合理的かつシンプルなアプローチは、日本の高専生が培ってきた技術とは異なる、新鮮な驚きを私たちに与えてくれました。言葉や文化の壁を越え、純粋な技術力とアイデアで難題を突破していくその姿は、ロボット技術に国境がないことを改めて証明してくれたように感じます。
この快挙の背景にあるのは、日本が世界に展開してきた「KOSEN(日本式高専制度)」の確かな成果です。
15歳から実戦的な工学教育を行い、理論と実践を融合させるこの日本独自の教育モデルは、今や日本国内に留まらず、国境を越えて現地の若き才能を見事に開花させています。KOSEN-KMITL(タイ高専)の学生たちが示した高い問題解決能力と創造性は、この教育体系が有する普遍性と世界最高水準の育成計画を何よりも雄弁に物語っています。
自ら考え、手を動かし、試行錯誤を繰り返す——。高専教育が育む「社会実装への情熱」は、今や世界共通の価値観として、次世代のイノベーターを輩出する揺るぎない基盤となっているのです。
一方で、現実の福島第一原発に目を向ければ、廃炉作業は依然として予断を許さない喫緊の課題として私たちの前に立ちはだかっています。試験的なデブリ取り出しが一歩進んだとはいえ、その先には未だかつて誰も経験したことのない困難な道のりが待ち受けています。この未踏の領域を切り拓くためには、既存の技術の延長線上にある解決策だけでは不十分なのかもしれません。
だからこそ、本大会で示された可能性に大きな希望を感じずにはいられません。私たち日本が長年現場で積み上げてきた「経験」と「緻密な技術」に、世界中から結集した「知見」や「柔軟な発想」を掛け合わせる。その融合によって化学反応を起こし、真の意味での「廃炉創造」を実現することこそが、この困難な課題を解決へと導く鍵になるはずです。国内外の英知が混ざり合い、生み出された新しい技術力が、福島の未来、そして世界の原子力安全を支える希望の光となることを心から期待しています。今回のKOSEN-KMITL(タイ高専)の最優秀賞の受賞は、日本の高専生にとっても頗る大きな刺激となり、互いに高め合う「共創」の時代の幕開けを感じさせてくれるものでした。本大会は、高専教育が持つ無限の可能性と、そこから生まれる確かな一歩を実感できる、大変実りある有意義な時間でした。
※本コンテストでの高専生の活躍は、廃炉創造ロボコンのYoutubeチャンネルにてご覧頂けます。
第10回廃炉創造ロボコン(ライブ動画配信)
