高専トピックス

本コンテストは、日本原子力研究開発機構と廃止措置人材育成高専等連携協議会が主催し、2016年にスタートしました。今年で9回目を迎え、廃炉作業に必要な人材育成を目的に毎年開催されています。福島第一原発の廃炉作業は、30〜40年の長期的な取り組みが必要とされており、本コンテストはその未来を担う技術者の育成を目指しています。
過去の大会では、狭い場所での遠隔操作や高所での除染作業など、実際の現場で活用可能なアイデアが数多く生まれ、注目を集めてきました。また、ロボット製作を通じて、学生が廃炉への関心を深めるとともに、課題発見力や解決能力を高めることも目標としています。

会場となった日本原子力研究開発機構 楢葉遠隔技術開発センター
今年のテーマは「福島第一原子力発電所原子炉格納容器(PCV:Primary Containment Vessel)内部調査」を想定した競技です。例年と比較し高難易度のミッションに対して、高専生たちは独自のアイデアと技術力を活かして創意工夫を凝らしたロボットで挑みました。
2024年12月21日(土)、日本原子力研究開発機構楢葉遠隔技術開発センター(福島県双葉郡楢葉町)で開催された本コンテストには、高専14校16チーム、マレーシア工科大学の1チームを加えた計17チームが参加しました。その中から表彰された4チームの成果を中心に、高専生たちの熱い挑戦の軌跡をお届けします。
(掲載開始日:2025年1月20日)
ルール概要

今回は、競技フィールドを①または②から選択できる。
①はX-1ペネトレーション、②は小口径配管からPCV内に侵入するフィールドである。
廃炉創造ロボコンの競技課題は、PCV内部調査を模擬しており、PCV内部にアクセスし、核燃料デブリに見立てたオブジェクト(一辺10mmのアクリル製立方体、以下デブリとする)を回収して、元の場所まで戻ってくる任務に挑戦します。
参加チームは、X-1ペネトレーション(※1)(直径500mm)または小口径配管(呼び径(※2)40mm)のいずれかを選択し、そこから、製作したロボットをPCV内部に進入させます。
製作したロボットは、X-1ペネトレーションを選択した場合、約10mのグレーチング(鉄で作られた格子状のふた)上を走行し、5mの階段を降下します。小口径配管を選択した場合、3mの配管を通過し、4m下降します。その後、デブリが配置された場所に向かって走行し、デブリを回収してスタート位置に戻ります。
競技フィールドは、狭隘部や階段など、実際のPCV内部の苛酷な環境を再現しています。最小狭隘部の幅は0.5mで、ロボットの設計には高度な工夫が求められます。
※1 X-1ペネトレーション:福島第一原子力発電所の原子炉格納容器(PCV)にアクセスするための開口部の一つ。
※2 呼び径:直径が一定ではないものに対して平均的な値、または内径に近似した寸法。
日本原子力研究開発機構 楢葉遠隔技術開発センター内部は高さ33mのとてつもない広い会場で圧巻。
競技の特徴として、ロボットを直接目視できない点が挙げられます。参加者はロボットから送られてくるカメラ映像のみを頼りにロボットを遠隔操作で制御します。制御方式は有線・無線のどちらも可能ですが、オペレーションエリアからPCV内部は完全に見えない設定です。
ロボットの大きさと重量に制限はなく、参加チームの創造性を最大限に引き出すルールとなっています。また、競技時間は10分間です。もし、競技続行が不可能と参加チームが判断したら競技を中断して、ロボットのデモンストレーションができます。このデモンストレーションでは競技中充分には見せられなかったロボットの機能をアピールすることができます。
競技パフォーマンスだけでなく、テストラン中の審査員による質疑応答に対する受け答えも評価対象となっており、技術的な理解度も重要です。
なお、優秀な成績を残したチームには、以下の賞が授与されます。
・最優秀賞(文部科学大臣賞)
・優秀賞(福島県知事賞)
・アイデア賞(独立行政法人国立高等専門学校機構理事長賞)
・技術賞(国立研究開発法人日本原子力研究開発機構理事長賞)
また、特別協賛企業から特別賞がそれぞれ贈られます。
参加チーム一覧(高専名・チーム名・ロボット名・表彰名)
| 高専名 | チーム名 | ロボット名 | 表彰名 |
| 小山工業高等専門学校 | 小山高専廃炉ロボット製作チーム2024 | Tube Liner Ⅹ | 最優秀賞(文部科学大臣賞) |
| 旭川工業高等専門学校 | 旭川高専廃炉ロボット研究会 | HAIROBO | 優秀賞(福島県知事賞) |
| 茨城工業高等専門学校 | 茨城高専平澤研究室 | Αριαδνη | 技術賞(国立研究開発法人日本原子力研究開発機構理事長賞) |
| 鶴岡工業高等専門学校 | 鶴岡高専 G チーム | KINTARO | アイデア賞(独立行政法人国立高等専門学校機構理事長賞) |
| 熊本高等専門学校(熊本キャンパス) | 熊本高専熊本キャンパスロボコン部Aチーム | 天掴 | 特別賞・株式会社ビーエイブル |
| 富山高等専門学校(本郷キャンパス) | KANEKENS | 真田くん | 特別賞・東芝エネルギーシステムズ株式会社賞 |
| サレジオ工業高等専門学校 | サレジオ工業高等専門学校廃炉創造ロボコンチーム | Drop Out | 特別賞・株式会社アスム賞 |
| 福島工業高等専門学校 | 福島廃炉研究会 | D# | 特別賞・株式会社東京エネシス賞 |
| 熊本高等専門学校(熊本キャンパス) | 熊本高専熊本キャンパスロボコン部Bチーム | Tetra Viper | 特別賞・日立GEニュークリア・エナジー株式会社賞 |
| 舞鶴工業高等専門学校 | 舞鶴High↑Low↓研究会 | あけぼの | 特別賞・株式会社アトックス |
| 一関工業高等専門学校 | 藤原研究室 Bチーム | 歩きメデス | |
| 一関工業高等専門学校 | 一関高専機械技術部 | Ichinobot | |
| 岐阜工業高等専門学校 | 新生岐阜高専 | バタフ雷 | |
| 呉工業高等専門学校 | Re:team | plumber brothers | |
| 宇部工業高等専門学校 | ∃-project | lazy of snake | |
| 大阪公立大学工業高等専門学校 | Fukaken | 坂四駆 | |
| マレーシア工科大学 | KL Dynamics | S.A.M. |
最優秀賞(文部科学大臣賞):小山工業高等専門学校

小口径配管からグレーチングまでをスムーズに突破する様子。
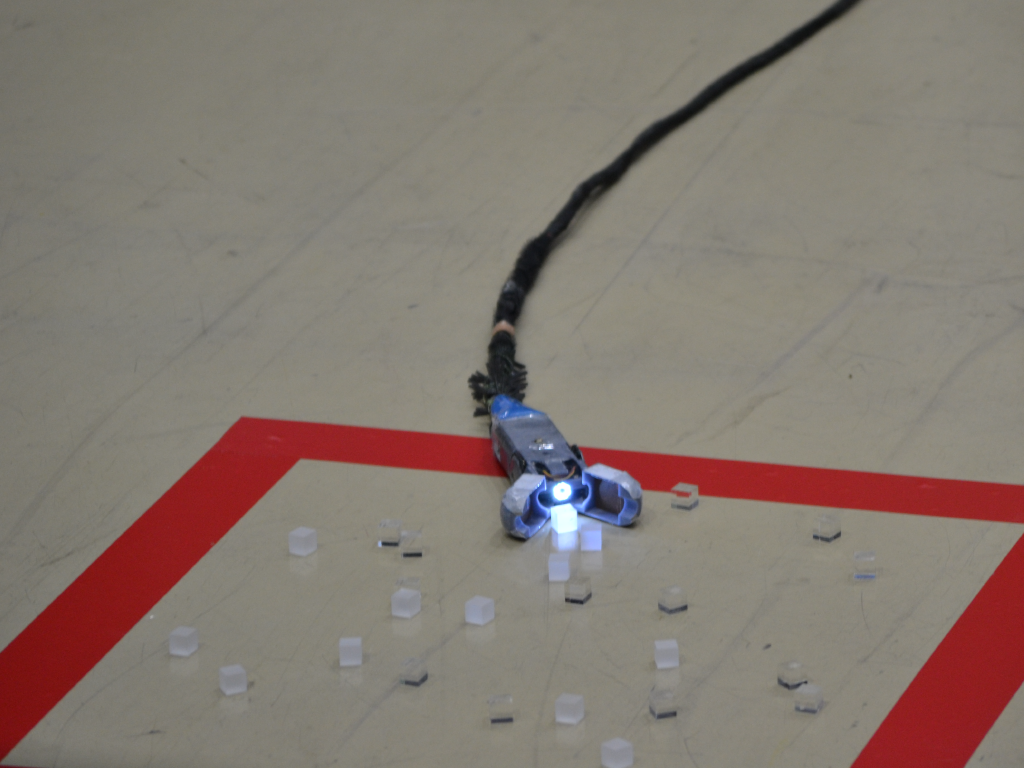
ロボット前方が蚕の幼虫の口のように開閉し、デブリを確実に掴み、落とすことなく無事に帰還することができた。
チーム名:小山高専廃炉ロボット製作チーム2024
ロボット名:Tube Liner Ⅹ
栄えある最優秀賞に輝いたのは、小山高専の「小山高専廃炉ロボット製作チーム2024」でした。
同チームは、小口径配管からのPCV内部への進入およびデブリ回収に挑戦し、製作したロボット「Tube Liner Ⅹ」は細いパイプ内を移動しながら廃炉現場での調査を想定した高度な設計が特徴です。全長34mmという極小サイズで、ロボット後方についているケーブルの抵抗力が課題となる中、左右の車輪とブラシによる振動推進を組み合わせた移動機構を採用し、スムーズな移動を実現しました。
ロボット前方にはLEDとファイバースコープカメラ(※)を搭載し、移動中の状況把握やデブリの視認を可能にしています。また前方には、蚕の幼虫の口のような回収機構が備わっており、自由に開閉可能なグリッパーでデブリを正確に掴むよう設計されています。デブリ回収時においては、ファイバースコープカメラ映像だけでは奥行きの把握が難しい中、練習で培った経験をもとに、カメラの映像から、デブリの回収状況を判断し、巧みな操作技術を駆使して、見事にロボットとともにデブリを持ち帰ることに成功しました。結果として、残り1分31秒で課題をクリアし、審査員からは「制限時間内に与えられた課題を完全にクリアした唯一のチーム」と高く評価されました。
これにより、小山高専は4年連続の最優秀賞受賞という大偉業を成し遂げました。小山高専のロボットは、廃炉現場での実用性を考慮した設計と自在な操作技術の融合を示し、廃炉技術の未来に繋がる可能性を感じさせる素晴らしい成果でした。
※ ファイバースコープカメラ:狭い場所や暗所を確認する柔軟な管状カメラ。
優秀賞(福島県知事賞):旭川工業高等専門学校
X-1ペネトレーションの中からのスタートを選択することも出来たが、あえて難易度の高い、外からのスタートを選択し、会場をどよめかせた。

まるで掃除機のように効率よくデブリを回収している子機。
チーム名:旭川高専廃炉ロボット研究会
ロボット名:HAIROBO
最優秀賞に次ぐ成果を挙げ優秀賞となったのは、旭川高専の「旭川高専廃炉ロボット研究会」でした。
同チームは、X-1ペネトレーションからPCV内部にアクセスし、デブリを回収する方式に対応したロボットを製作しました。このロボットは、親機と子機の2機構で構成され、連携することで高度な機能性を発揮します。
親機は移動と子機の排出・回収を担当し、メインクローラとサブクローラを併用した移動機構により高い機動力を発揮します。さらに、カメラとライトも装備されているため、視界が悪い環境でも正確な操作が可能になっており、実際の廃炉作業現場を意識した実用的な設計が特徴です。
一方、子機はデブリ回収を専門とし、ひっくり返っても走行可能な設計で高い安定性と機動性を兼ね備えています。ローラーが回転しながらデブリを回収する仕組みを採用しており、デブリ回収の効率性の高さは、大会随一でした。
移動時には、子機が親機内に格納され、親機が階段の手前まで移動します。また、回収作業時には、親機が子機を排出し、子機はケーブルで接続されたまま階段を降りてPCV内部でデブリ回収作業を行います。
作業終了後、親機がウインチ機構(※)を使用して子機を引き寄せ、再び格納して帰路につく流れです。
競技ではデブリを回収した子機を親機が格納し、スタート地点に戻るところでタイムアップとなってしまいましたが、パフォーマンスは続けられ会場は最後まで見届けました。数分後には無事に帰還することができ、熱い拍手が会場を包みました。
審査員からは、「連続出場で培った技術を活かし、完成度の高いロボットを製作した」との高評価を受け、優秀賞に選ばれました。
※ ウインチ機構:滑車やドラムなどでワイヤーを巻き取る機構。
技術賞(原子力機構理事長賞):茨城工業高等専門学校
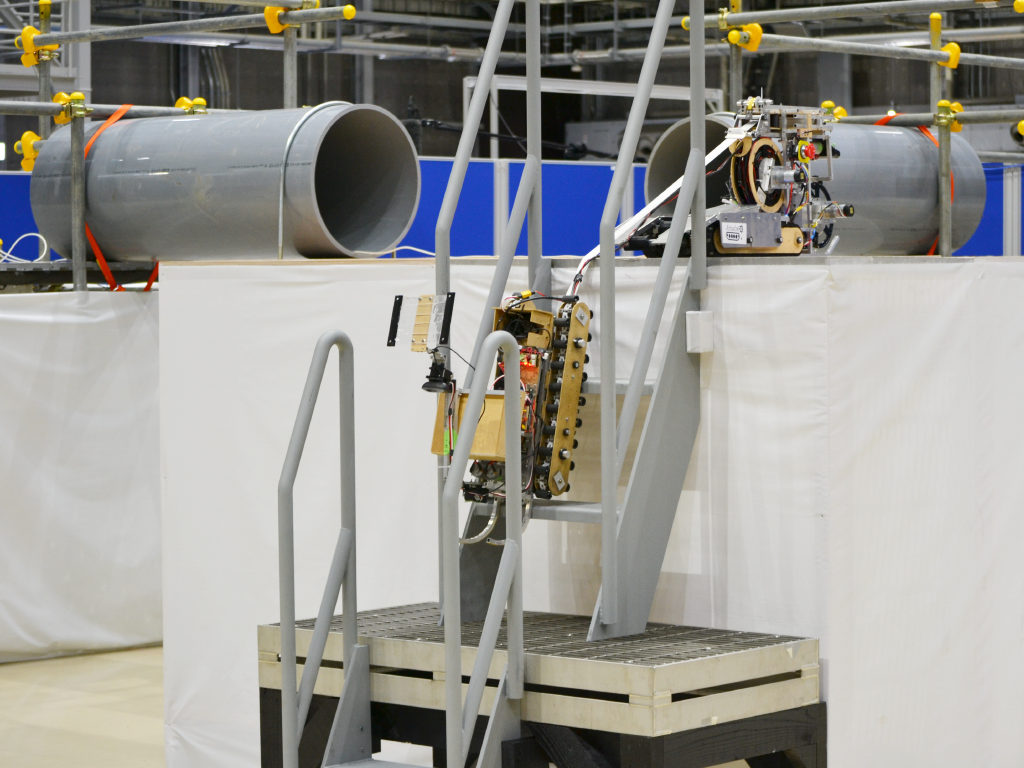
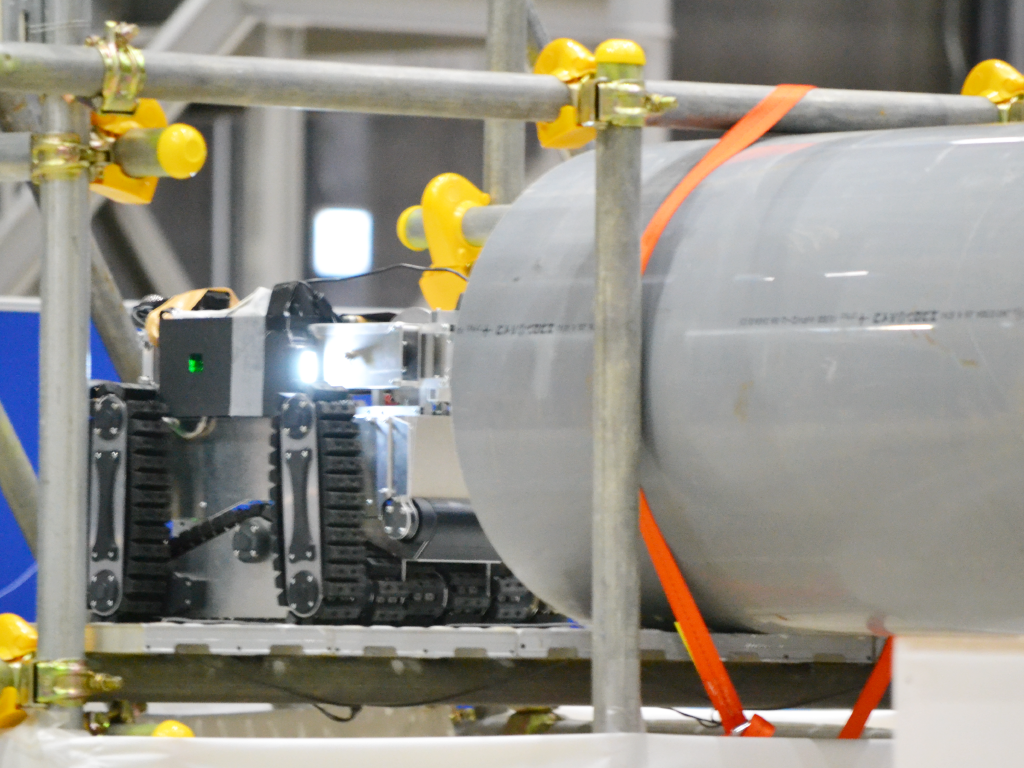
ウインチ機構と固定機構のおかげで、上部ロボットはびくともせず、安定してデブリ回収ロボットを階段から下ろす様子。
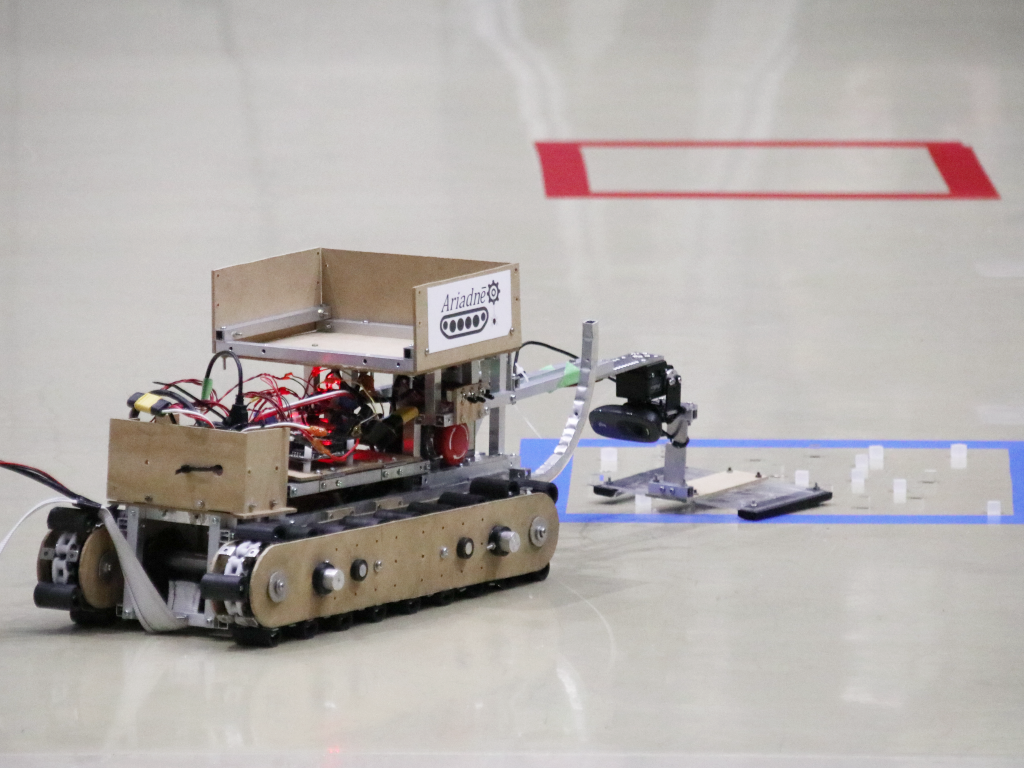
粘着テープがついてるハンドを用いてデブリを回収する手法は、他のチームには無いユニークな回収を披露した。
チーム名:茨城高専平澤研究室
ロボット名:Αριαδνη
技術的な完成度の高さが評価される技術賞には、茨城高専の「茨城高専平澤研究室」が選ばれました。
同チームは、X-1ペネトレーションからPCV内部への進入およびデブリ回収に挑戦し、本機は、廃炉内の悪路を想定した全方向に移動可能なクローラ機構を備え、階段の走破性を大幅に向上させています。
また、グレーチング上や階段での安全確保のためにウインチ機構と固定機構(※)を活用し、万一の転倒や落下を防ぐ設計が特徴的です。さらに、アームと粘着テープを用いたハンドによるデブリ回収がシンプルかつ確実に行えるよう工夫されており、廃炉内作業を想定した実用性の高さが光ります。
競技では有線ケーブルによる運用が行われ、安定した通信を可能とする一方で、ケーブルの取り回しに細心の注意が払われました。走破性の高い子機(回収機)をウインチ機構を使って分離・移動させる手法も独創的でしたが、デブリ回収後の復帰で階段に詰まり、惜しくもタイムアップとなりました。
審査員からは「スターターとしての緊張の中、もう少しで完走というところまで完成度を高めた」「デブリ取り出しのメカニズムなど類まれなアイデアと工夫があり、確実な技術を組み合わせて信頼性あるロボットに仕上がっている」という評価がなされ、見事技術賞を受賞しました。
※ 固定機構:本ロボットの下部に取り付けられており、ロボットを固定することができる。
アイデア賞(高専機構理事長賞):鶴岡工業高等専門学校
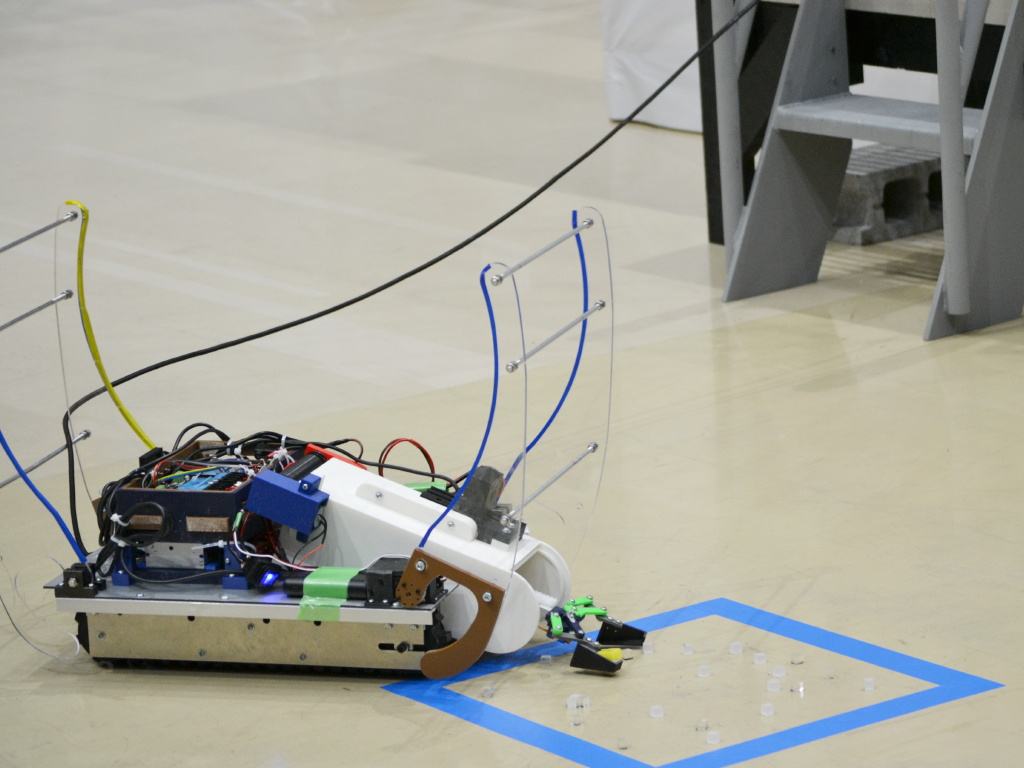
マジックハンドのような回収装置がロボットから飛び出る仕様となっている。
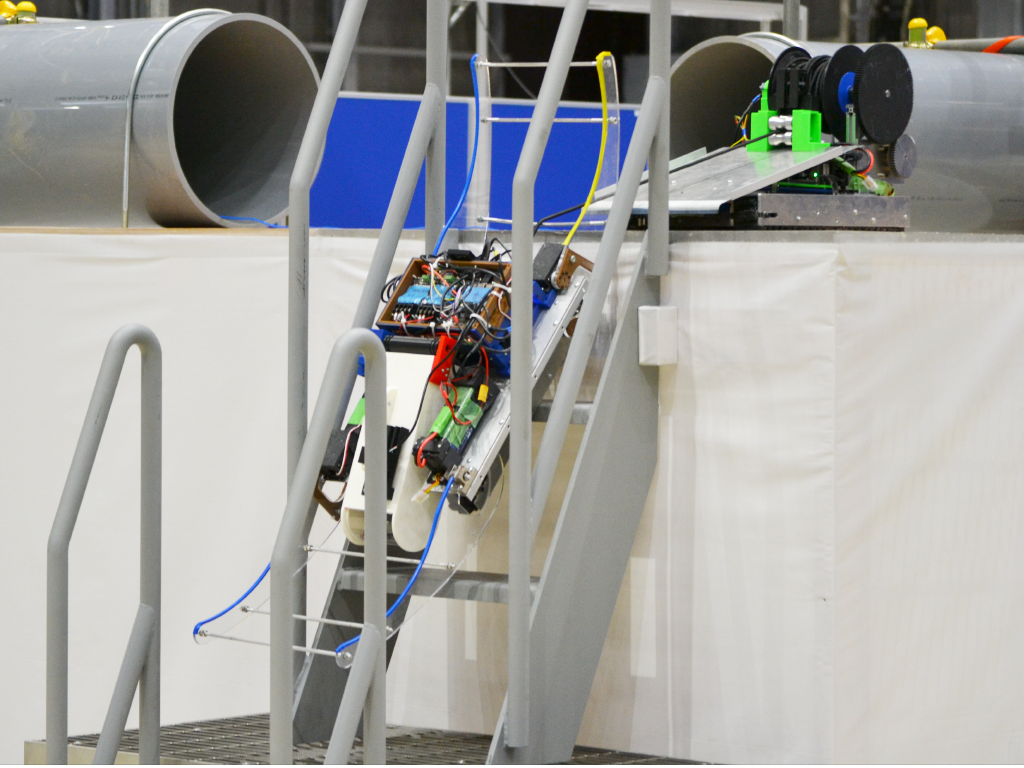
「そり」のように階段を降りている子機。
チーム名:鶴岡高専 G チーム
ロボット名:KINTARO
優れたアイディアを発揮したチームに贈られるアイディア賞に選ばれたのは、鶴岡高専の「鶴岡高専 G チーム」でした。
同チームは、X-1ペネトレーションからPCV内部にアクセスし、デブリを回収する方式に対応したロボットを製作し、階段の昇降にそりを利用するという独創的なアプローチをしました。
このロボットは、親機と子機の2つの構成要素となっています。親機は子機の移動と操作を担当し、子機はデブリの回収を専門としています。子機には、アクリル板を加工して作成したソールが装備されており、そりで雪山を滑り降りるかのように、階段をスムーズに下ることができます。
デブリ配置場所に到着すると、子機は、マジックハンドのような機構で、デブリを掴み取り、回収します。回収されたデブリは、密閉性の高い内部の回収ボックスに格納されます。
デブリを無事に回収し、階段をうまく登れず競技中断してしまったものの、審査員からは、階段の昇降に「そり」を活用したアイデアがユニークであり、12月という季節感にもマッチしていると高く評価されました。この独創的なアプローチが、アイデア賞の受賞につながりました。
おわりに
今回のコンテストでも、実際の廃炉現場さながらに設計されたコースで遠隔操作による障害物突破やデブリ回収を行うなど、高専生たちはロボット技術の可能性を余すところなく発揮しました。通信の不安定さやケーブルの取り回しといった難題に取り組む中で、新たなアイデアや改良を重ねながら、廃炉作業に求められる精密性や安全性をいかに高められるかが追求されていたのが印象的でした。
一方、実際の福島第一原発では、これまで困難とされてきたデブリの一部が試験的に取り出され、廃炉プロセスが前進しています。この取り出しの成果が示すように、ロボット技術が不可欠な要素となっていることは明白です。今回の大会で培われた高専生たちの創造性と技術力は、さらなるデブリ取り出しや作業効率化の実用的手段として大いに期待されます。彼らが独自に開発したセンサ技術や制御システム、遠隔操作のノウハウは、今後の廃炉現場で直面する複雑な課題に充分応用可能だと考えられます。
廃炉創造ロボコンを通じて学んだ経験と知見が、試験段階の先へと進むデブリ取り出しに活かされる未来は、そう遠くはないと感じられます。本コンテストで披露された高専生たちの努力の結晶であるロボット技術が、現場で有意な成果をもたらし、さらなる廃炉課題の解決に繋がる日が来ることを心から期待しています。
※本コンテストでの高専生の活躍は、廃炉創造ロボコンのYoutubeチャンネルにてご覧頂けます。
第9回廃炉創造ロボコン(ライブ動画配信)

