高専トピックス

オムニホイール・空気圧そして指導の転機
徳山高専 准教授 藤本 浩 先生
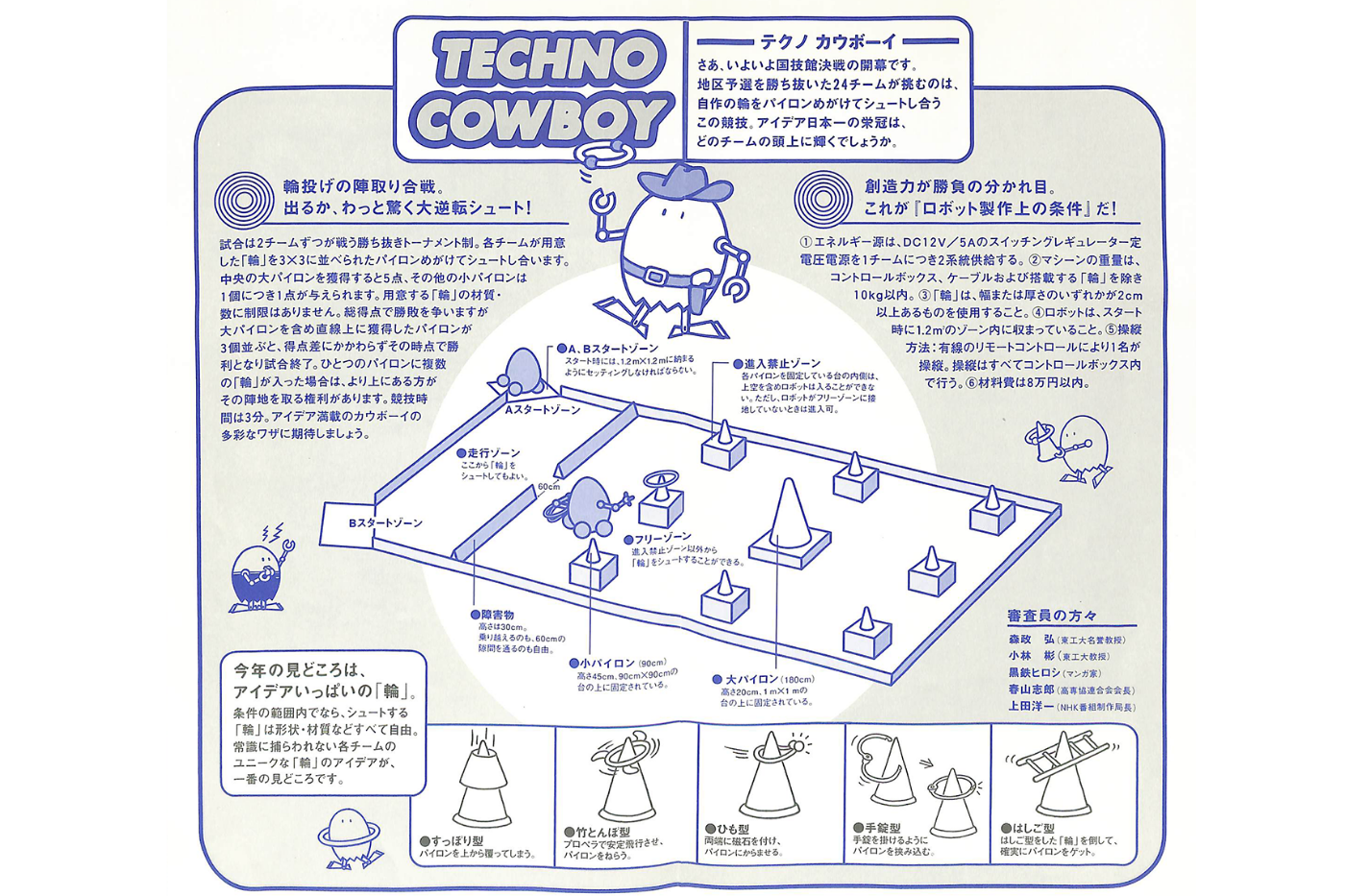
第9回高専ロボコン「テクノカウボーイ」の案内図。輪投げの輪は形状・材質が自由です。ポイントを重ねるよりも、直線上に3つのパイロンを並べる「ハットトリック」を狙うチームが多くなりました。
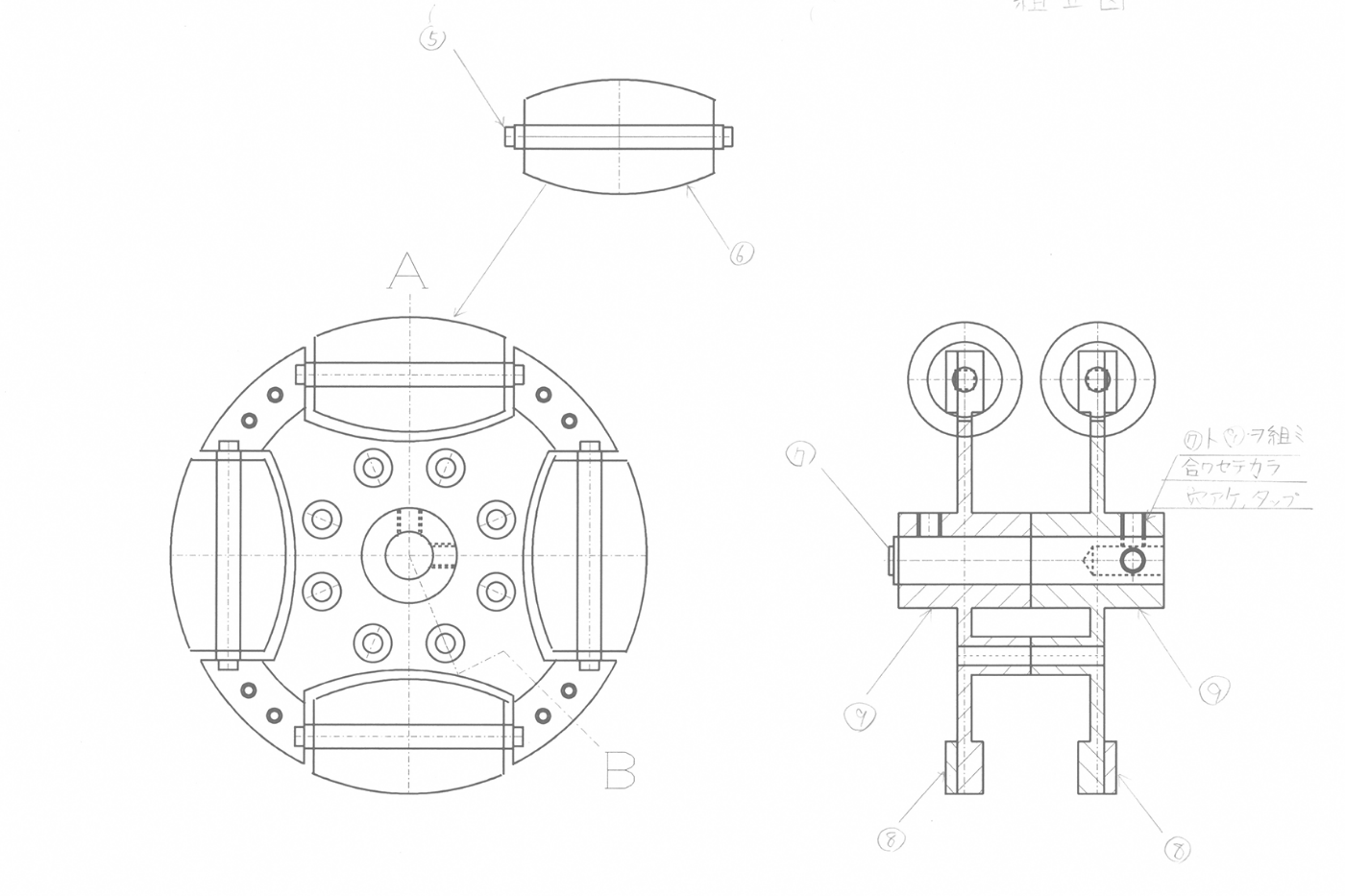
ロボットコンテストや移動搬送車などを扱う用務に携わっている読者の中には全方位移動可能なタイヤである「オムニホイール」をご存じの方は多くいらっしゃると思います。
私達は「午前10時」と命名したロボットにこのタイヤを採用して1996年度の全国大会「テクノカウボーイ」で優勝をしました。この優勝の立役者は間違いなくオムニホイールであると言えます。
当時、ロボットコンテストにおいて全方位移動と言えば3つ以上のタイヤの操舵(ステアリング)を独立に制御する方法がとられていましたが、その機構構成と制御には今日のように気軽に機器への組み込みができるワンチップマイコン・コントローラなどはありませんでしたので、耐久性のある機構と制御の信頼性を両立することはなかなか困難でした。特にタイヤ同士が接触するような競技では機構の脆弱性が際立っていました。
テクノカウボーイ競技では3×3個のパイロン(三角コーン)へ独自形状の輪っかを入れて最上位にある自陣の輪っかの数か、または中心にある大パイロンを含む直線上の2つの小パイロンを獲得すれば、これを「ハットトリック」として、その時点での勝利が決まるというものでした。
そこで私達は競技フィールドの中では相手ロボットとの接触を避けつつ、何れのパイロンにも素早く到達できる機動性が必要であることを重視して、自作レベルで信頼性のある全方位移動の方法をずっと考えていました。そして考え出したのがオムニホイールという構造のタイヤです。
調べたところによれば、オムニホイールは1919年に米国で初めて特許が取得されたとされており、主にテーブル上の荷物移動等のための従動輪として応用されていて、駆動輪として一般に認知され始めたのは近年のことです。
そのため、1996年当時の私達はオムニホイールを見たことも聞いたことも無く、インターネット経由の検索サイトが充実している訳でもなく、オムニホイールというキーワードさえ知らなかったので、同じ原理のタイヤが世の中にあることは当然のことながら知る由もありませんでした。
このような状況だったので、「新しい原理のタイヤを生み出したんだ、これこそアイデア対決だ。」と当時は疑いもなく自負していました。実際に、NHKでの全国大会の放送をご覧になった民間企業の方が、このタイヤを見せて欲しいと県外からわざわざ訪ねて来られることもありました。
今やロボット移動には欠かせない「オムニホイール」。この原理はすでに米国で特許を取得していましたが、我々はそれを知らずに独自にこの原理を使ったタイヤを作っていました。

現在はネットで簡単に手に入るオムニホイール。
このタイヤが完成したとき、忘れられないエピソードがあります。設計と製作を担当した学生が「先生、できました!」とそれまでに見たこともない満面の笑顔を浮かべ、嬉しそうに報告に来ました。
この学生は1年生から最終学年に至るまで、テスト勉強よりもロボコン命のような人物だったので、ロボットの製作期間中に成績が思わしくない時期もあったため、当時の担任から勉学に集中できるようにうにロボコンを一時辞めるようにとの指導が為されました。
そのため、その学生は学校に行けない精神状態となってしまい、当時の担任からすれば良かれと考えた指導が裏目に出た結末となりました。それ以後、担任が登校を促してもその状態は解消されませんでした。
この間、オムニホイールを組み込んだロボット「午前10時」は残りのメンバーで製作を進め、地方大会までギリギリの日程で一応の完成をみました。

優勝機「午前10時」。ロボットには、学生たちの強い思いが込められていました。
担任に許可を得て、このタイミングで学生に連絡を取って改めてロボコンへの参加を促したところ、翌日から登校してチームに加わることができました。
地方大会突破に向けてチームメンバーと共に汗を流す学生の姿を目にしたときのことは、今でも忘れられません。その後、この学生は無事に卒業を迎えることができました。
この一件で私はロボコンに懸ける学生の思いをきちんと受け止めていなかったことに気付かされました、どこかで「たかがロボコン」と思っていたのでしょう。全ての学生がこれ程の真剣な思いでロボコンに取り組んでいるとは限りませんが、思いの全てをロボコンに懸けている学生がいることを忘れてはならないと指導の際の指針として思いを新たにしました。
ひょっとしたら、この一件でこの学生の将来に禍根を残すことになったかも知れないと思うと、「たかがロボコン、されどロボコン。」この短いフレーズを自身に言い聞かせながら、指導に当たる決意をしました。

パイロンに向けて輪を連続して射出し通します。上にある輪が採用されるため、敵から被せられないようにすることや、輪をいかに早く通すかが大きな決め手となります。
ここで競技ロボットである「午前10時」について少し解説しておきます。ロボットに似つかわしくない命名だと思われた方も多いと思いますが、実は、毎日午前10時に集合してロボットの製作を行ったことが由来となっています。移動用の足回りについてはこれまで述べたとおりで全方位に自由に進むことができます。また、移動速度は2段階あって、競技フィールドに侵入する時などはフィールド中央への侵入箇所が1カ所で競合するため、ここぞというときに速い速度に切り換えます。
当時は試合前日のテストランにおいて全ての機能を紹介する義務が課せられていませんでしたので、この機能は作戦上秘密にしていました。試合中、突然移動速度が2倍になるので対戦相手はさぞ驚いたことと思います。
パイロンに向かって打ち出す輪っかは70枚程度を積層搭載して、丸断面のベルトコンベアを利用して一番下の輪っかから連続的に発射するようになっています。また、この発射部は大パイロンの高さが競技スタート時点でのロボットの制限サイズよりも高いので競技中は発射部を乗せた2段構成のシリンダーの内部に空気を入れて、その力でシリンダーを伸ばすことで高さを稼ぐようになっています。
この空気の発生源は乗用車のパンク修理に用いる非常用ポンプで、この時点ではペットボトルなどに貯めた圧縮空気を利用することがルール上認められていませんでしたので、直接ポンプを駆動する方法をとりました。大会では空気を利用して機構を動かすアイデアも私の知るところではそれまで例がなく、「午前10時」ではオムニホイールと共に新しい取り組みでした。
この空気圧を利用した方法は2000年の "ミレニアムメッセージ" 競技大会以降に、予め貯めた空気圧の利用が許可されたことにより、それ以降多くの高専が空気圧シリンダーを利用することになりました。(現在、ペットボトルでの圧縮空気の利用は安全上の観点から禁止されています)
栄えある優勝を果たしたこの大会では、3人のメンバーの個性がそれぞれ異なっていたことが勝因だと考えています。
私は32年間で2度の優勝を経験しましたが、優勝できるチームとはどのようなメンバー構成かと問われたら、今ならロボットの性能もさることながら、最も重要なのは「選手3名の性格がバラバラでありながらも、相互を補完し合える関係であるメンバーで構成ができたとき」と答えます。
この年は男性2名と女性1名の構成で面白いようにそれぞれの性格が違っていて、一人の男子学生はブラジルからの留学生で非常に楽天的でどのような状況においても前向きな明るい性格をしていました。もう一人の男子学生は繊細で技術力があり、よく緊張もしますが、メカニックとしては他のメンバーが全面的に頼りにしていました。操縦を担当する唯一の女子学生はアーチェリーの選手としても活躍していて、その競技時間がロボコンの競技時間と同じ3分間であるため、本人曰く「3分間を他のメンバーよりも長く感じることができると思います。」と言うほど終始落ち着いた性格の持ち主でした。
競技においてはロボットが壊れたり、圧倒的不利となったり、ルールに抵触することが懸念されるようなプレッシャーを掛けられたりと想定外のこと等が、さまざま発生します。
このような場面では、それぞれが同じように几帳面で繊細な性格であれば、緊張のため問題を解決するための発想ができないことも考えられますが、性格の異なるメンバーの一人が楽天的であれば、そこから脱出する発想ができる可能性が大きくなります。
多様性とかダイバーシティというキーワードが跋扈する現代ですが、その本質はこのようなところにあるのではないでしょうか。全国大会では我々が苦手とする機能を搭載した相手もありましたが、ピンチにおいてメンバーが互いに補い助け合うことによって優勝を手にすることができました。

現在も徳山高専に展示されている「午前10時」(中央)と他ロボット。年月が経ち古びても、このロボットたちと共に過ごした時間は尊く、今でも当時のことを思い出します。
全国大会と言えば宿泊の斡旋先も変遷があります。現在では交通混雑などを考えて全国大会での宿泊先に両国国技館近くのホテルが斡旋されますが、ロボコン初期の頃は国立オリンピック記念青少年総合センター(略称:オリセン)が用意されていました。
加えて、現在では全国大会にやってくるロボットの詳細情報が事前にインターネットによって様々な形で公開されていますので直接ロボットを見てもあまり新鮮味を感じませんが、当時は地方大会を見学に行くか地元の知り合いに大会の様子を教えてもらう以外には情報を得る手段がありませんでしたので、全国大会の会場で初めて見る他高専のロボットはとても新鮮で胸が踊りました。
また、その日に知り得たロボットの情報を持ち寄って作戦を考えるオリセンでの恒例ミーティングはチームの一体感が醸成される何とも言えない楽しいひと時でもありました。
少しマンネリ化を感じられるようになった大会も以前に立ち返り、ロボット情報の非公開というのも一興だと思いますが、皆さんは如何でしょうか。

藤本 浩
徳山工業高等専門学校 機械電気工学科 嘱託准教授
創造・特許教育を担当、二重螺旋ポンプ、電動車椅子用着脱可能な安全停止装置、乳幼児うつぶせ寝検出装置など数々の開発及び応用と、高専ロボコンには1991年開催の第四回大会から指導者として参加し、全国大会優勝、準優勝、ロボコン大賞、技術賞、アイデア賞等幾多の実績を有する。
『SolidWorksによる3次元CAD -Modeling・Drawing・Robocon』(共著)
(掲載開始日:2024年6月12日)