高専トピックス

「諦めなければ思いは叶う」私の人生観を変えた大会
徳山高専 准教授 藤本 浩 先生
「高専ロボコン2013」の課題は「Shall We Jump?」。生き物を模した2台のロボットと3名の選手が協力して縄跳びをして、その速さや連続ジャンプの回数を争う競技でした。
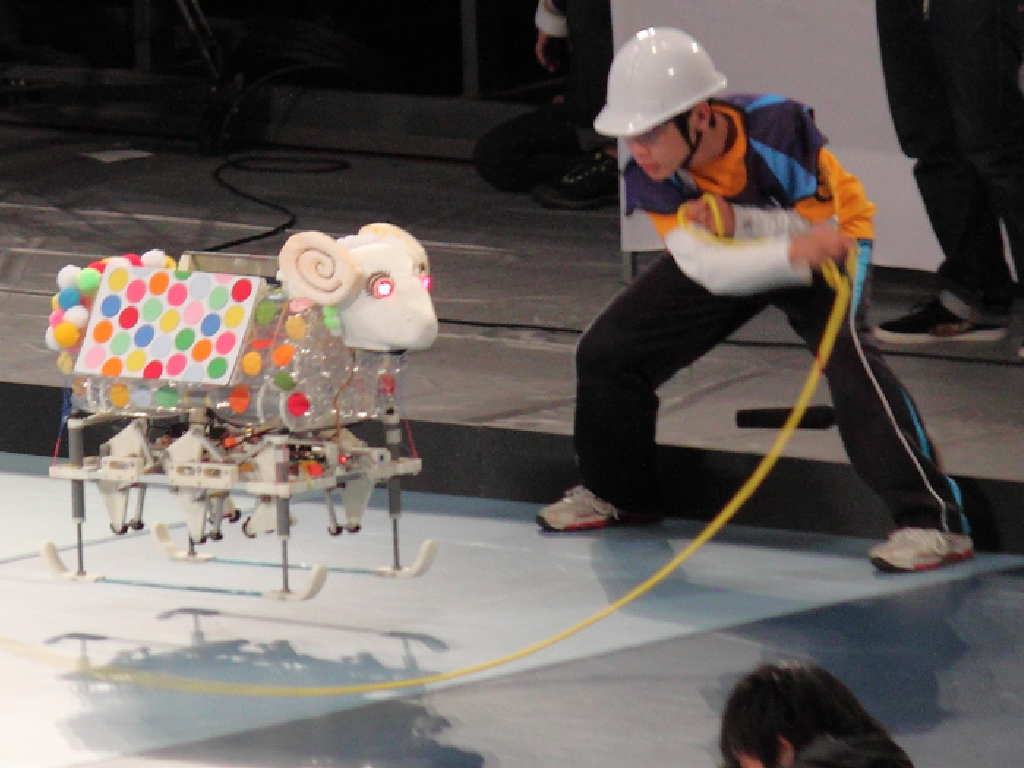
移動しながらの複数回ジャンプの課題は、過去に例がなく競技者にとっては大きなハードルとなった。
競技ルールを目にして我々が最初にこぼす第一声は「今年も無理難題のルールを突きつけてきたな!」ということです。高専ロボコンが面白いといわれてきたのは、このような難題に対して選手達がいつも独自のアイデアで乗り切ってきたからに他なりません。とは言え選手側は大変です。
「Shall We Jump?」の競技には過年度から担当している出題者が何故かこだわり続けてきた①多足歩行に加えて、②電源を持たないコントローラでの操縦、③ロボットがジャンプして縄飛びをするという3つ大きなハードルが設けられていました。ハードル①と②についての対応はこれまでに実績のある方法を取り入れられますが、問題は③の縄飛びでした。
過去に「ふるさと特急便」という競技でロボットをジャンプさせたことはありましたが、大縄跳びのように何回も、しかもこれを移動しながら行うことはありませんでした。そこで、私たちがまず取り組んだことは縄を回したときに床に当たった縄がどのような軌道を描いてロボットの下面を通り抜けて行くかを確かめることでした。今日ではスマホでのスロー撮影が容易にできますが、当時はそのような機材を簡単に用意するとはできない時代でした。ところが、運良くスロー撮影できるカメラを手にすることができたため、それを使って何度も何度も実験を重ねました。
その結果、床に当たった縄はそれ程跳ねることなく、ほぼ床と平行に低い位置で直線的に走っているという事実を確かめることができました。この結果を踏まえてロボットのジャンプに必要な高さを割り出してジャンプ機構を設計しました。ジャンプの方法はペットボトルに詰めた圧縮空気を塩ビパイプで作ったエアーシリンダーに送り、シリンダーが伸びる勢いでジャンプするというものでした。また、ロボットを軽量化するために当時どこの高専も使っていなかった3Dプリンタで製作したパーツを随所に使用しました。このようにして出来あがったのが徳山高専の「色とりドリィ」です。
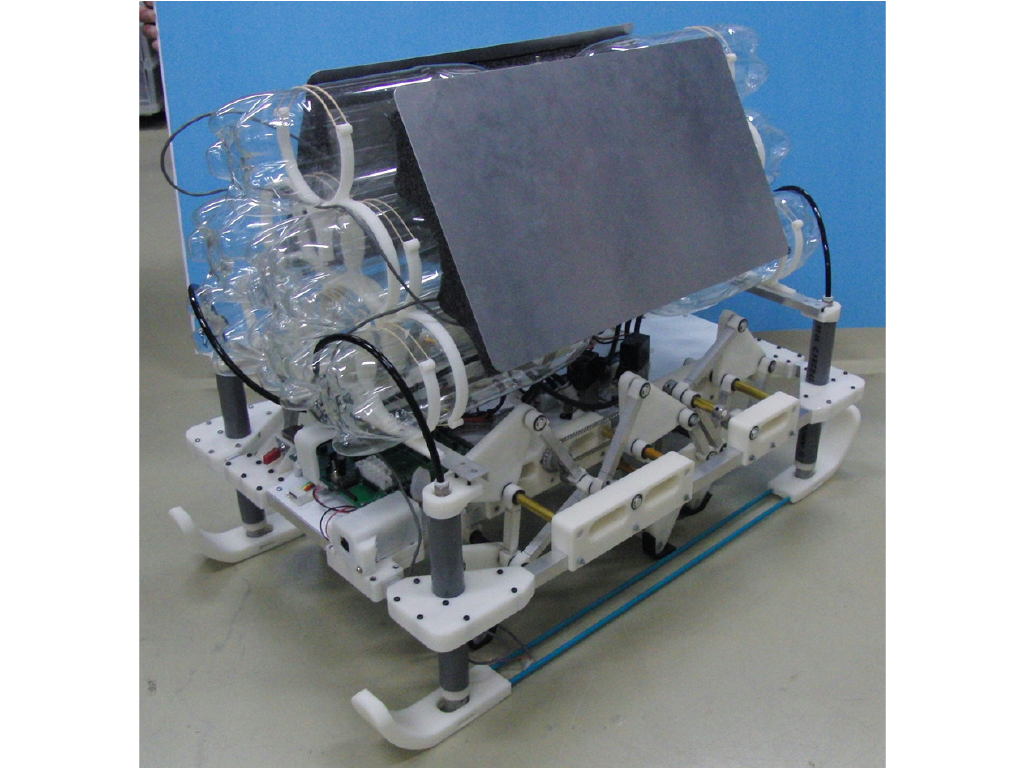
「ドリィ」のメカニズム、当時は珍しかった3Dプリンタで製作したパーツを使用し、軽量化を図った。
「色とりドリィ」は縄をジャンプする「ドリィ」と縄を回す「オオカミィ」の2台ペアロボットで構成されています。地区大会においては、審査員推薦で全国大会出場を果たせたものの、試合では前半リードしていたにもかかわらず、わずか2回戦で敗退しています。ロボットの走行速度が少し遅かったなど色々と反省すべき点はあるのですが。一番の原因は選手間の連携のまずさや競技ルールの解釈不足など選手達の問題でした。全国大会に向けてはこれらの点を猛省し、ロボットの改良と選手間の連係をできる限り洗練し、腰に湿布が必要になるほど縄回しの練習を重ねてタイムを縮めました。
このような努力の結果、チームの連携は格段に良くなり、ロボットは2倍以上の速度に、連続ジャンプ回数も100回から200回以上と改良され、タイムも全国トップレベルの30秒台前半を出せるまでになりました。この時点で全国大会においてもある程度互角の戦いができるのではないかと自信を持てるようになりました。
全国大会はトーナメントによる勝ち抜き戦で、優勝までには5試合を戦わなければなりません。また、1回戦から3回戦まではタイムレースで勝敗が決まり、準決勝、決勝では競技時間内に跳んだ連続回数で勝敗が決まる変則的なルールが全国仕様として設定されました。このルールでは速く走ることができて、安定した多くの連続ジャンプができる2つの優れた機能が必要となり、後にこの変則ルールが徳山高専に優勝をもたらす要因ともなりました。

ロボットのコントローラーはゲーム機の筐体を利用。
全国大会ではリハーサルを兼ねて実際の競技を想定して行われるテストランがあります。全国大会に入ってからはロボットの調整が順調で、圧縮空気のチャージに気をつける以外はあまり心配することがありませんでした。しかし、選手達はリハーサルにもかかわらず両国国技館とNHKの撮影体制の中で、足がガクガクする程緊張していたこともあり、操縦ミスを連発しました。(後に選手たちはこの時が一番疲れたと話しています。)また、リハーサルでは実際の試合における審判の判断を助けるためにロボットの詳細な動きを説明する時間が設けられます。選手たちがロボットの説明を終えると競技委員の一人からロボットに対して予期しないクレームが伝えられました。
その内容は「縄跳びのタイミングを合わせるのに食品である飴玉を使用するのは如何なものか、試合当日までに別のものに変更しなさい。」というものでした。飴玉をロボットに取り付けた振動板に当てることで縄跳びのタイミングを合わせる方法がユニークだとして全国大会推薦理由の一つとなっていたので、ここに来てこのようなクレームがつくとはメンバーの誰も予想していませんでした。
その結果、順調に推移していたロボットの調整が一気に余裕を無くし、慌てて飴玉の代わりになるものを調達しに走る羽目となりました。結局、少々危険を伴うがビー玉が良いのではないかということになり、何とか競技委員の了解を得てこの問題を乗り切ることができました。しかし、どう考えてもビー玉よりあめ玉の方が明らかに安全だと思ったので、競技委員には内緒で、試合ではあめ玉を使い続けました。

全国大会当日になって、ルールの解釈が変更されたり、新たな障壁が加わることもある。その対応がロボコン競技の面白さでもある。ピットとなっている力士の支度部屋の様子。
1回戦は八戸高専との対戦でした。ドリィの速さは相手のロボットより勝っていたものの初戦の緊張からか操縦ミスが目立ち、前半は相手にリードされてしまいましたが、後半で何とか追いつき辛くも勝利しました。
2回戦目は香川高専(詫間キャンパス)との対戦でした。詫間キャンパスはほぼ毎回全国大会に名乗りを上げる強豪校ですが、徳山は初戦の緊張から立ち直り36秒の好タイムで勝利しました。
3回戦目は旭川高専との対戦となりました。3回戦では最後の規定連続ジャンプが5回から10回になりジャンプの安定性と速さが必要となります。相手のロボットは連続ジャンプの速度こそ早いものの走行の速度で徳山が勝っていましたので、操縦ミスは少しありましたが無難に勝利することができました。
準決勝の相手は熊本高専でした。ここからの勝敗は競技時間一杯まで跳んだ連続ジャンプの回数で決まります。連続ジャンプに入った時点では徳山がリードしていましたが、途中ジャンプの速さで勝る相手ロボットに抜かれてしまいました。
このままでは敗戦確実というところで幸運にもジャンプの安定性に欠ける相手ロボットが競技フィールドから外へ出たところで審判に制止されたため、100回の連続ジャンプを決めた徳山が辛くも決勝への駒を進めることができました。
決勝戦は本大会最速を誇る奈良高専のロボット「じゃんぺん」との戦いになりました。奈良のロボットは決勝までに20秒という驚異的なタイムを叩き出していて誰もが優勝候補として疑わないロボットでした。それだけでも徳山にとっては不利な状況にあったのですが、あろうことか試合直前にロボットの足が動かなくなるとんでもないハプニングに見舞われてしまいました。

決勝では、強豪の奈良高専「じゃんぺん」との対戦。直前にロボットの足が動かなくなるハプニングが発生。
原因は4試合のハードな戦いの中で、ドリィの足を駆動しているチェーンベルトが伸びたために緩んで、チェーンベルトの掛かっているスプロケットとの位置関係がずれたために3足ある右足の内で、真中と後ろの足が干渉して全く動けなくなってしまいました。緊迫の中での修復作業でしたので、学生の怪我を憂慮して私も少し手を貸して何とかチェーンベルトを掛け戻すことができたのですが、このとき完全には元に戻っておらず、後ろ方向にだけようやく動ける状態となっていました。この状況から私は勝利を完全に諦めていましたが、選手達は全く諦めていませんでした。
スタート直前のセッティングタイムでドリィのお尻を進行方向に向けたバックでのスタートに作戦を切り替えたのです。バックでのスタートは練習を通じて一度も行ったことはなかったので、選手達自身も通常通りの動きができるとは思っていなかったと思います。案の定それまでの試合を通して最もミスの多い試合となりました。
しかし、決勝戦でロボットを何とか動かして勝敗を決したいとの強い思いから最後まであきらめずに操縦し、懸命に縄を回し続けた結果、その思いが通じたのかバック走行で戻ってくるしかなかったはずのドリィが走行の途中でずれていたチェーンベルトの位置が元に戻るという、とんでもない偶然を引き起こしました。
そのため途中から通常の走行が可能となり、折り返しゾーンから前を向いて大急ぎで帰って来るドリィを見たとき、まるで選手達の思いに呼応して頑張っているいるかのように思えました。
その後、連続ジャンプで先を走っていた「じゃんぺん」の連続ジャンプがセンサの不調により118回で中断するなど、徳山にとっては奇跡に次ぐ奇跡にも恵まれて圧倒的に不利であったはずの連続ジャンプも、徳山高専124回、奈良高専118回という試合終了3秒前の大逆転優勝劇に繋がりました。

決勝では、ハプニングの中、奇跡が重なり大逆転勝利となった瞬間、歓喜の中、会場も一つとなった。
この大会では徳山高専のロボットが圧倒的に優れた能力を持っていたわけではありませんでしたが、選手たちの「最後まであきらめない」という強い気持ちが優勝を招来したことは疑う余地のないところです。残念なことに放送時間の関係もあり、NHKの番組では決勝戦の様子はさらりと編集されて盛り上がりに欠ける感がありましたが、競技時間残り3秒でのまさかの大逆転劇で最後まで観客をドキドキハラハラさせたこの決勝戦は、ロボコンに係わってきた32年間を振り返り私の知る限りにおいて希に見る好勝負でした。
特別には触れられていませんでしたが、地方大会の2回戦で敗退した私たちが戦った全試合が、各地区大会の優勝校であったことを考えると、誰が徳山高専の優勝を想像したでしょうか。このことをしてもこの優勝が如何に奇跡的な幕切れであったかを物語っています。
なお、決勝戦の緊迫状態での怪我を未然に防ぐ目的で私が修理に少し手を貸したことと、決勝戦を20分遅らせたことで収録時間を超過させたことにより、翌年のルールブックには「ピットでは指導者が手を貸さない、決勝戦の延長は認めない」との2つの文言が追加されました。


藤本 浩
徳山工業高等専門学校 機械電気工学科 准教授
創造・特許教育を担当、二重螺旋ポンプ、電動車椅子用着脱可能な安全停止装置、乳幼児うつぶせ寝検出装置など数々の開発及び応用と、高専ロボコンには1991年開催の第四回大会から指導者として参加し、全国大会優勝、準優勝、ロボコン大賞、技術賞、アイデア賞等幾多の実績を有する。
『SolidWorksによる3次元CAD -Modeling・Drawing・Robocon』(共著)
(掲載開始日:2023年12月15日)