高専トピックス
廃炉創造ロボコンは、全国の高等専門学校(以下、高専)の学生が参加する競技イベントで、東京電力福島第一原子力発電所の廃炉作業に関連した課題解決アイディアを競い合います。
本コンテストは日本原子力研究開発機構と廃止措置人材育成高専等連携協議会の主催の元、2016年から毎年開催され、今年で8回目の開催となります。福島第一原発の廃炉作業は、30〜40年かかると言われており、将来的な人材育成の一環としてスタートしました。
ロボット製作を通じて学生たちに廃炉について興味を持ってもらうこと、並びに廃炉作業の課題点を発見し、その課題に対してロボットを用いて解決する課題発見能力及び課題解決能力を養うことを目的としております。具体的には、原子炉建屋内における除染作業を想定した競技が実施されます。
2023年12月23日(土)日本原子力研究開発機構の楢葉遠隔技術開発センター(福島県双葉郡楢葉町)で開催された本コンテストには高専13校16チームとマレーシア工科大学の全17チームが参加しました。
その中でも、表彰された5チームを中心に高専生たちの活躍をお伝えします。
(掲載開始日:2024年1月15日)
ルール概要
本競技は、東京電力福島第一原子力発電所の原子炉建屋内の高線量エリアで行われる遠隔高所除染作業を想定しています。
参加者は自ら製作したロボットを操縦し、競技フィールド内の指定された除染対象エリアへと移動させます。その後、除染用壁に貼り付けられた模造紙を指定されたペンで塗りつぶし、スタート地点へと戻ります。この一連の作業を10分以内に完了し、作業効率を評価します(※1)。
競技フィールドは、原子炉建屋内の狭隘な通路や平坦ではない難路を模しており、障害物が設置されています。
まずはスロープ(幅2000㎜×奥行880㎜×高さ75㎜、勾配約15°)(※2)を通過し、次にグレーチング(幅1200㎜×奥行1200㎜×高さ95㎜)(※3)を越えて、除染用壁(幅1091㎜×高さ2700㎜)へ進みます。
壁には、高さ1900㎜〜2700㎜の位置に模造紙(幅1091㎜×高さ788㎜)が貼られており、この模造紙にペンでインクを塗ります。より多くの色を塗ったチームがより多く除染したと見なされます。
作業後は、障害物を再度通り抜け、スタート地点に戻ります。また、実際の除染作業を想定した制約、例えば無線通信の禁止や実機の直視禁止などが設けられています。
高所作業を想定して設計されているロボットは、重心が高く傾斜やグレーチングを越える際にバランスを崩しやすいため、高専生の創意工夫が期待されます。新たに導入されたスタート地点へ戻るというルールでは、帰路で自分のケーブルが障害となる可能性があり、ケーブルに引っかかると動けなくなるため、スムーズに戻るためのコース取りやナビゲーション技術が求められます。
今回授与される賞は、最優秀賞(文部科学大臣賞)・優秀賞(福島県知事賞)・技術賞(国立研究開発法人日本原子力研究開発機構理事長賞)・アイディア賞(独立行政法人国立高等専門学校機構理事長賞)・イノベーション賞(公益財団法人福島イノベーション・コースト構想推進機構理事長賞)があります。
また、特別賞が特別協賛企業からそれぞれ贈られます。
※1 実際の除染作業は、壁の表面を削るなどして放射性物質を取り除くが、競技の都合上このような形を取っている。
※2 進行方向に緩やかな勾配をもつ通路のこと。
※3 鉄格子の蓋のこと。一般的に道路脇の側溝や工場の足場などで使用される。
参加チーム一覧(高専名・チーム名・ロボット名・表彰名)
| 高専名 | チーム名 | ロボット名 | 表彰名 |
| 小山工業高等専門学校 | 小山高専廃炉ロボット製作チーム2023 | Wall Grinder Ⅸ | 最優秀賞(文部科学大臣賞) |
| 熊本高等専門学校(熊本キャンパス) | 熊本高専熊本キャンパスロボコン部 | 47 式洗車 | 優秀賞(福島県知事賞) |
| 一関工業高等専門学校 | 藤原研究室 Bチーム | Robo-GTP | 技術賞(原子力機構理事長賞) |
| 舞鶴工業高等専門学校 | 舞鶴高専廃炉研究会B | Kalexa | アイディア賞(高専機構理事長賞) |
| 大阪公立大学工業高等専門学校 | Fukaken | 66B++ | イノベーション賞(イノベ機構理事長賞) |
| 福島工業高等専門学校 | 福島廃炉研究会 | D++ | 特別賞・アトックス賞 |
| マレーシア工科大学 | MJIIT | Savor’s arm | 特別賞・日立GEニュークリア・エナジー賞 |
| 鶴岡工業高等専門学校 | 鶴岡高専 F チーム | LITTLE DEMON | 特別賞・東京エネシス賞 |
| 大阪公立大学工業高等専門学校 | 昆虫同好会 | ろくまる | 特別賞・アスム賞 |
| 富山高等専門学校(本郷キャンパス) | KANEKENS | 孫・清丸 | 特別賞・東芝エネルギーシステムズ |
| 大阪公立大学工業高等専門学校 | 公大高専ろぼ部廃炉チーム | カクリーナー | 特別賞・エイブル |
| 旭川工業高等専門学校 | シン・人田製作所 (しん・ひとだ せいさくじょ) | 下町ロボット v2 | |
| 舞鶴工業高等専門学校 | 舞鶴高専廃炉研究会A | Houga | |
| 呉工業高等専門学校 | Kure-Liner | 除染 Master | |
| 沖縄工業高等専門学校 | ずっと 学生だったらなあ | Buddies | |
| 神戸市立工業高等専門学校 | 日番やり直し | ぞうきん | |
| サレジオ工業高等専門学校 | 育英高専 廃炉創造ロボコン研究室 | CRカエデ |
最優秀賞(文部科学大臣賞):小山工業高等専門学校
飛行機のナビゲーションライトを参考にして、右側に緑色、左側に赤色のライトが取り付けられている。
チーム名:小山高専廃炉ロボット製作チーム2023
ロボット名:Wall Grinder Ⅸ
栄えある最優秀賞に輝いたのは、小山高専でした。
製作したロボットは、現場での稼働を想定した考慮が随所に施されていました。
ロボットはメインのロボットと、ロボットとの通信を行なうLANケーブルの絡まりを防ぐことを目的としたケーブル巻き取りロボットで構成されています。
ロボット上部には、飛行機のナビゲーションライトを参考にしてデザインされた、右側に緑色、左側に赤色のライトが取り付けられており、暗所での作業時にライトの距離からロボットの向きを判断出来るようになっています。また、ロボットには蓄光塗料が塗られており、暗所でも視認出来るように工夫されています。
インクの塗布機構にも工夫が施されており、ペンの部分に振動モータが付いています。これによりペンが壁に適切に押し付けられ、ペンが浮かず均質なインクの塗布が可能となっています。
審査員からは、全チームの中で最も性能が安定しており、実際の現場での適用性を考慮しているとの評価を受け、最優秀賞を受賞しました。
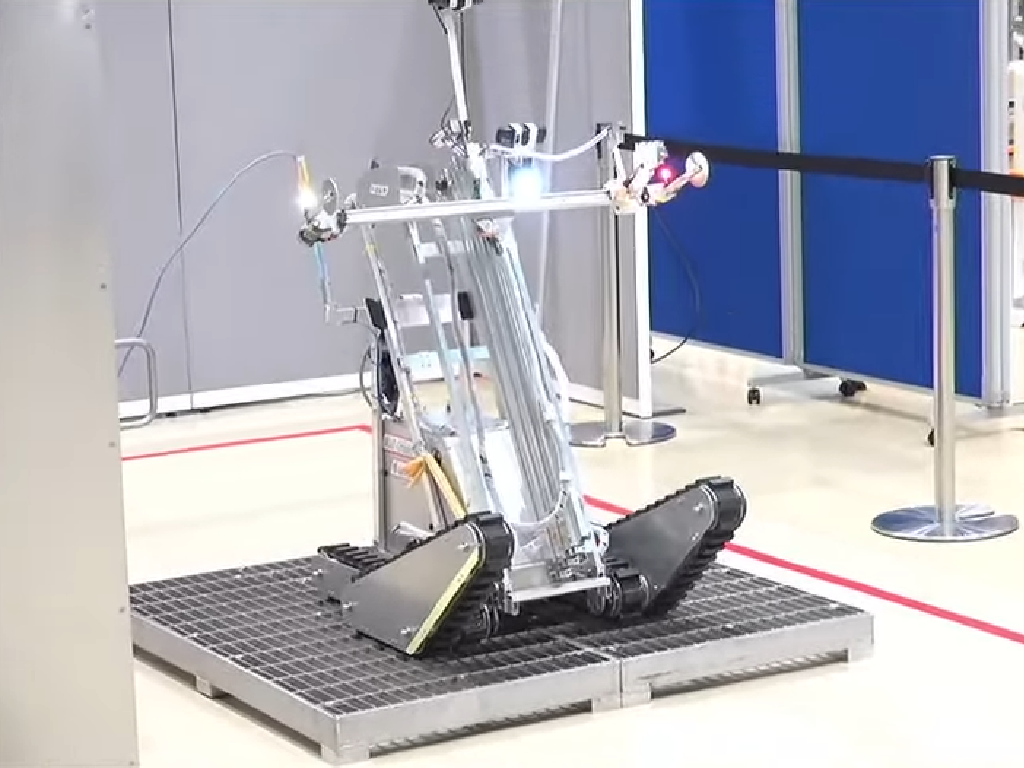
優秀賞(福島県知事賞):熊本高等専門学校(熊本キャンパス)
ロボット下部にあるジャッキの仕組みを用いて車体を持ち上げ、グレーチングを超える様子。
チーム名:熊本高専熊本キャンパスロボコン部
ロボット名:47 式洗車
最優秀賞に次ぐ成果を挙げ優秀賞となったのは、熊本高専でした。
製作したロボットは、移動機構の部分に戦車のように大きく2列で構成されたクローラーを採用しています。
また、クローラーベルト表面には各列交互にブロックが付いており、そのブロックをスロープやグレーチングに噛み合わせることで安定した走行を実現していました。インクを塗布する機構も大型で、広範囲に塗布する姿を披露してくれました。
また、ロボット下部にはジャッキ(※)のような棒を出し入れする機構があり、グレーチングを乗り越える際に車体を持ち上げたり、高所のインク塗布をする際、車体が前傾してしまうのを防いだり、ロボットの姿勢制御にも工夫が盛り込まれていました。
帰路のケーブル問題も十分に対策されており、ケーブルを巻き取りながらスタート地点へ無事に戻ることができました。
審査員からは、安定した走行性能や優れた巻き取り装置を実装した点、ロボットの重心を考慮していた点が評価され、優秀賞を受賞しました。
※ 小さい力で重い物体を持ち上げるための機械的道具
技術賞(原子力機構理事長賞):一関工業高等専門学校
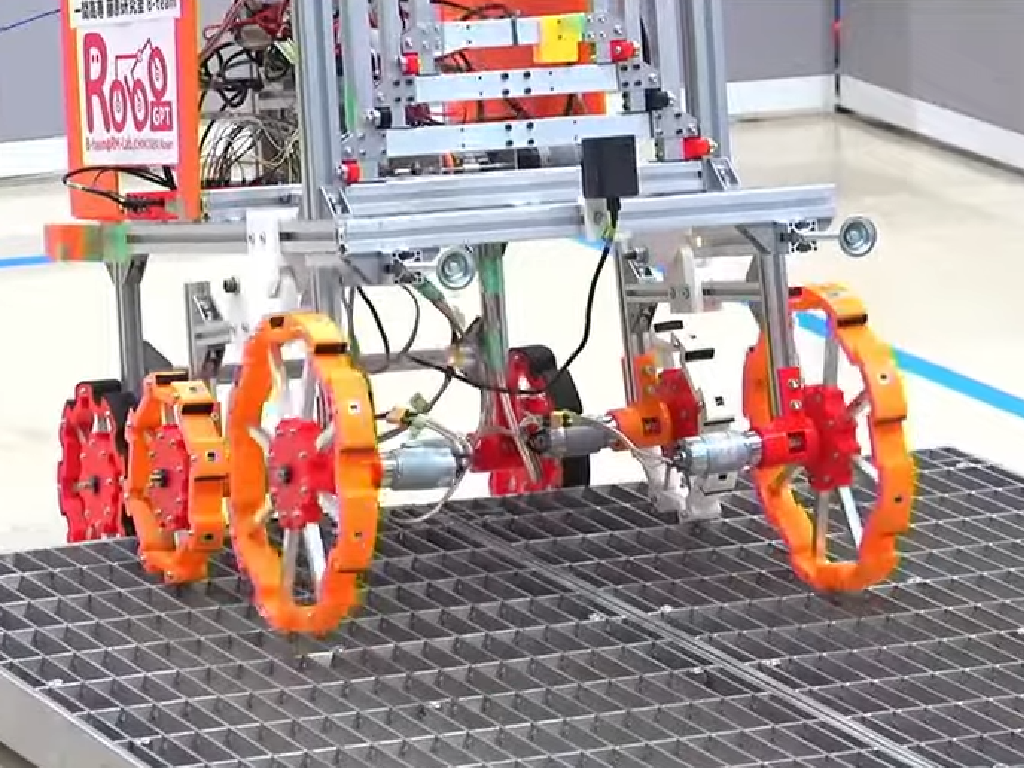
車輪の形状が凹凸になっているため、グレーチングの隙間に引っかかりやすくなり、安定した走行が可能となっている。
チーム名:藤原研究室 Bチーム
ロボット名:Robo-GTP
技術的な完成度の高さが評価される技術賞には、一関高専が選ばれました。
製作したロボットは、車輪が右側3輪・左側3輪の6輪で構成されており、前方2輪は後方4輪よりも車輪径が大きくなっています。
また、車輪は意図的に凹凸を有した形状となっており、グレーチングの隙間に引っかかりやすくなっています。
特徴的な車輪径構成と車輪形状により、グレーチングを越えることが可能となっています。
審査員からは、3Dスキャナで点群データを取得し、ロッカーボギー機構(※)を実装した技術力が素晴らしいとの評価を受け、技術賞を受けました。
※ NASAが開発したサスペンション装置のこと。車体が安定しつつ、不均一な路面に対しても柔軟に走行可能。
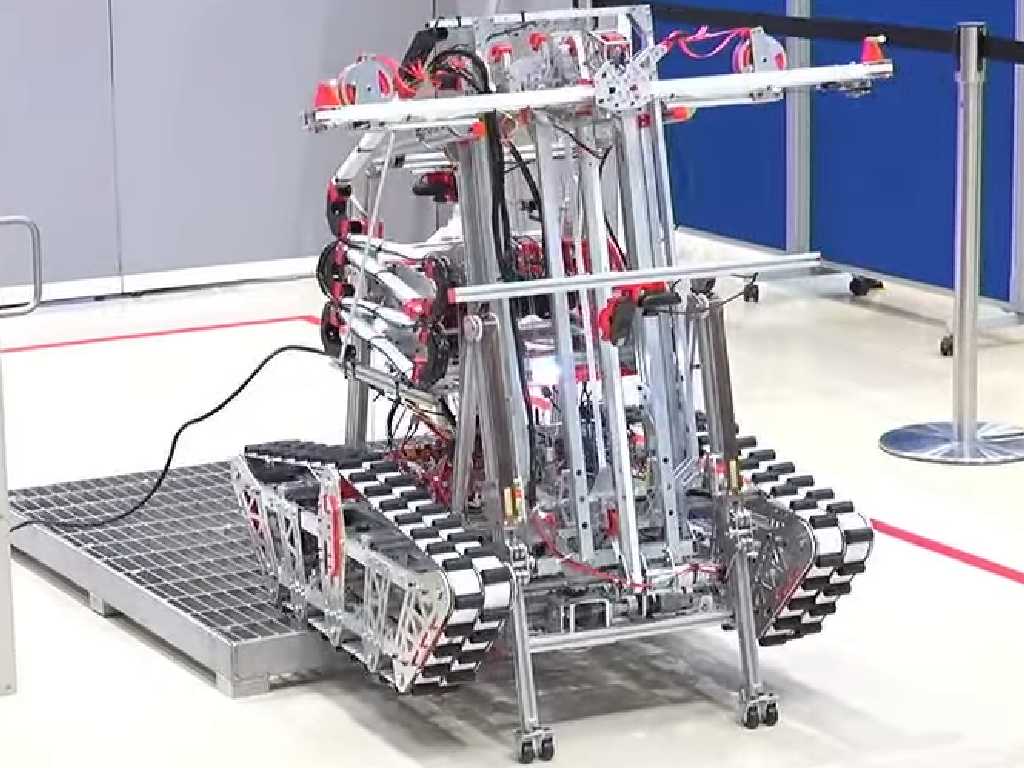
アイディア賞(高専機構理事長賞):舞鶴工業高等専門学校
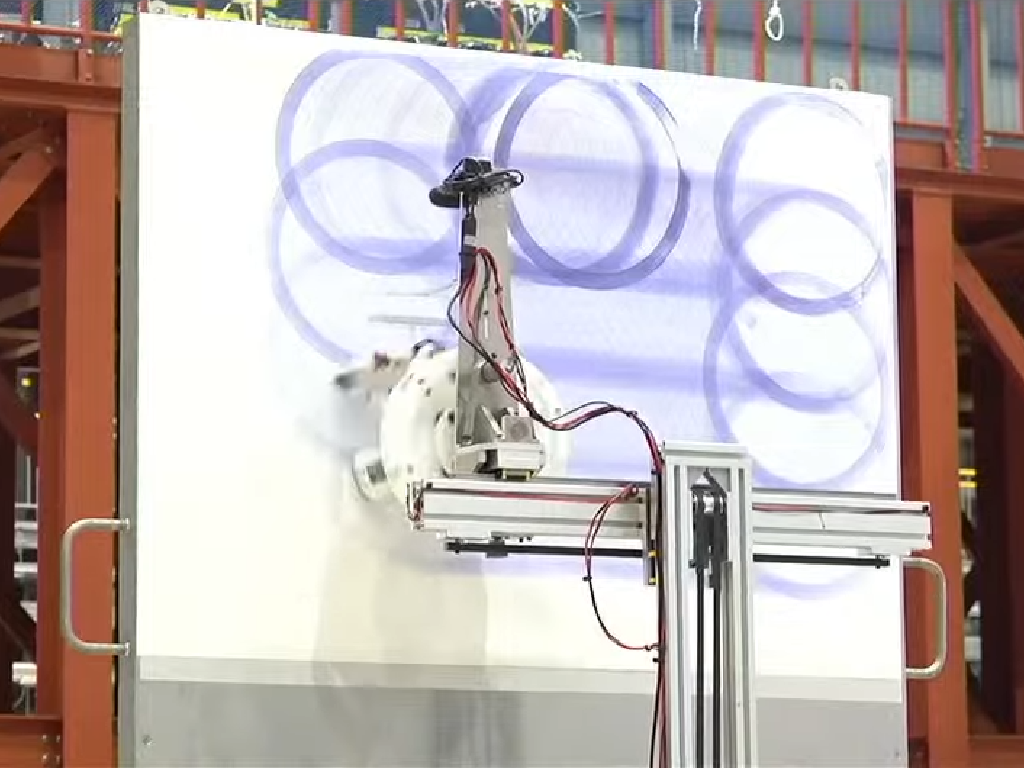
円を描きながら上下左右へスムーズにスライダーを動かす機構は、他のチームには無い独創的かつ実用的な工夫でインクを迅速に全面に塗布することを実現。
チーム名:舞鶴高専廃炉研究会B
ロボット名:Kalexa
優れたアイディアを発揮したチームに贈られるアイディア賞には、舞鶴高専が選ばれました。
製作したロボットの車輪は大きなクローラーを2つ採用し、クローラーの機構もスロープやグレーチングを乗り越える際に転倒しないよう角度が緻密に設計されていました。
グレーチングを乗り越える際、出場したチームで最も多かった仕様が車体を持ち上げてグレーチングを乗り越えるというものでしたが、このチームは車体を持ち上げずともクローラーで勢いよく駆け抜けていくことが可能です。
インクを塗布する機構は、円運動で回転する装置にペンを装着しており、まるで乗用車にワックスをかけるかのようにスムーズにインク塗布を行いました。
また、円運動で回転する装置には縦、横に動くスライダーが設置されており、ロボットの位置はそのままで、スライダーのみを動かして塗布する構造のため効率を重視した工夫が盛り込まれていました。スタート地点へ戻る際も難なく戻り、当大会最速の7分15秒でゴールを果たしました。
審査員からは、歴代最強の足回りを実装し、最大の除染面積と最速タイムを出したロボットへの創意工夫が評価され、アイディア賞を受賞しました。
イノベーション賞(イノベ機構理事長賞):大阪公立大学工業高等専門学校
ロボット後方に設置された箱から補助輪が伸びる様子。
チーム名:Fukaken
ロボット名:66B++
イノベーション賞には、3チーム出場した大阪公立大学工業高専のチーム「Fukaken」が選ばれました。
ロボットは、重心の位置と車輪の寸法や形状が考えられて製作されており、
通常の移動時は、ロボット前方の車輪を使用し、グレーチング部分を乗り越える際は、グレーチングの上にロボット前方の車輪を乗せて、ロボット後方に設置された箱から補助輪を伸ばす事で、傾いた車体を水平に戻し、スムーズにグレーチングを越えることを可能としています。
またインクの塗布機構は、優勝した小山高専同様、上下左右の方向に移動させることが可能で、高さを少しずつずらし、横方向に塗布していく構造となっていました。
審査員からは必要な機能がバランス良く実装されていたという評価を受け、イノベーション賞を受賞しました。
おわりに
廃炉創造ロボコンは、廃炉内部の作業を再現しており、実際の作業場所に直接近づくことはできません。このため、ロボットに取り付けられたカメラを見ながら遠隔操作し、除染作業を実施します。
参加チームは、通信の問題や有線ケーブルの管理などの難題に直面しながらも、それぞれ独自のアイディアでロボットを設計し、技術力を競い合いました。
廃炉作業には依然として多くの課題が存在しますが、高専生たちはこれらの問題に対して真摯に取り組んでいます。
2011年3月11日に原発事故が起きた当時には小学生だった高専生たちは、廃炉に対応するロボット開発において、創造性や問題解決能力を遺憾なく発揮していました。
このコンテストを通じて、高専生たちが廃炉に対して育んだ興味や知識、アイディア、技術力が今後、実際の作業現場で生かされ、廃炉問題の解決に大いに寄与する可能性を実感できる素晴らしいコンテストでした。
※本コンテストでの高専生の活躍は、廃炉創造ロボコンのYoutubeチャンネルにてご覧頂けます。
第8回廃炉創造ロボコン(ライブ動画配信)

